Embarquez avec des scientifiques, des ingénieurs et des marins pour une navigation-exploration des relations avec l'océan, le climat et les énergies marines dans la perspective du changement climatique
La marée est un phénomène qui résulte de l’action gravitationnelle de la Lune et du Soleil. La marée est un phénomène bien documenté sur lequel une abondante information est disponible dans la littérature et sur internet. Voir notamment le site du Laboratoire d'Océanographie Physique et Spatiale. Sur nos côtes de la façade Atlantique-Manche, on observe 2 marées hautes et 2 marées basses par jour. La hauteur d’une marée, ou marnage, varie d’un jour à l’autre selon la phase de la Lune et la période de l’année. Lors d’une lunaison, les marées les plus fortes dites de vive-eau interviennent 36 heures après la Nouvelle Lune et la Pleine Lune.
Figure 1 : Variation de la hauteur d’eau à Brest lors du mois de mars 1980 – Source : SHOM
En France, on a l’habitude de caractériser une marée par son coefficient. Une marée de vive-eau moyenne possède un coefficient de 95, une marée de morte-eau moyenne un coefficient de 45.
Figure 2 : Relevé des coefficients de marée durant l’année 2001 – On note une variation sur 2 semaines environ, avec des maxima lors des équinoxes de printemps et d’hiver – Ce diagramme varie légèrement d’une année à l’autre
La figure 3 montre l’amplitude la marée dans la Manche.
Figure 3 : Marnages de vive-eau dans la Manche pour un coefficient de 100 – Les lignes rouges indiquent l’heure de la marée haute après le passage de la Lune au sud. Lorsque la marée est haute en Bretagne, elle est basse en Picardie – Les lignes bleues montrent la hauteur de la marée – On peut noter la forte disparité selon les lieux. Elle varie de 6,1m à Brest à 11m à Saint-Malo et 2m à Bournemouth. Source : IFREMER
La figure 4 indique l’amplitude de la marée dans le Monde. On constate que le marnage est généralement inférieur à 50 cm. Seules quelques régions sont soumises à de fortes marées. Nos côtes en font partie.
Figure 4 : Marnages sur l’océan mondial. L’onde de marée tourne autour de points dits amphidromiques dans le sens indiqué par les flèches – Source : NASA
On estime que l’énergie dissipée par les marées dans le monde est de 3,8 TW, dont 1 TW dans l’océan profond. Cette dissipation d’énergie ralentit la vitesse de rotation de la Terre. La durée du jour était par exemple de 21,9 heures il y a 620 millions d’années.
Les usines marémotrices
Historique
La variation de niveau de la mer a été utilisée depuis le haut moyen-âge pour faire fonctionner des moulins à marée. Ceux-ci possèdent un bassin isolé de la mer par un barrage. On laisse l’eau envahir le bassin à marée haute, puis lorsque la marée est basse, on ouvre la vanne du moulin pour exploiter l’énergie de l’eau accumulée. Une installation a été découverte dans Londres, datant de la période romaine. Des centaines de moulins de ce type ont été construits en Europe au Moyen-âge.
Figure 5 : Moulin à marée à Bréhat
Principe
Une usine marémotrice moderne comporte également un barrage qui isole un bassin de la mer. Le mouvement de la marée provoque des différences de niveau entre les masses d’eau qui sont mises à profit pour faire tourner des turbines hydrauliques.
Figure 6 : Schéma de fonctionnement d’une usine marémotrice – Ici, les turbines travaillent dans les 2 sens, lors de la marée montante ou descendante (double effet).
On voit sur la figure 6 que le dénivelé D est une fraction de la hauteur de marnage H :
D= k.H (1)
Si S(h) est la surface du bassin de retenue quand le niveau de l’eau est à la hauteur h au dessus de la basse mer, le volume turbiné durant la marée montante est donné par la formule :
Le volume est proportionnel à , si bien que l’énergie produite à chaque marée est :
On constate que la production est proportionnelle au carré du marnage, ce qui montre l’intérêt des sites ayant de grandes hauteurs de marée.
L’usine marémotrice de la Rance
L’utilisation de la marée pour produire de l’électricité a été abondamment étudiée depuis le milieu du 20éme siècle. Quelques projets ont été réalisés, le plus emblématique étant l’usine de la Rance, exploitée par EDF depuis 1966.
Les dossiers que l'on trouve sur internet donnent beaucoup d’information sur cette réalisation :
L’usine de la Rance comporte 24 groupes bulbe de 10 MW chacun. Ils fonctionnent dans les 2 sens du flux, lors de la marée montante ou descendante.
Figure 7: Schéma de l’usine marémotrice de la Rance – La coupe permet de visualiser un des bulbes, son conduit hydraulique, la halle de maintenance sous la route.
Figure 8: Schéma d’un groupe bulbe – Diamètre du rotor : 5,3m – Les pales sont orientables selon le sens du flux – Notez l’homme qui donne l’échelle
Figure 9: Vue d’un rotor coté mer durant une maintenance – Les 12 pastilles blanches sur la paroi correspondent aux anodes du système de protection cathodique
La production annuelle est de 500 GWh par an, ce qui correspond à la consommation d’une agglomération telle que Rennes.
L’énergie extraite par l’usine n’est qu’une fraction de l’énergie apportée par la marée. Par exemple, en vive-eau, environ 25 GW sont consommés par frottement sur les fonds du golfe de Saint-Malo (à l'est de la ligne Bréhat-Guernesey-Aurigny-cap de la Hague), alors que la puissance de l’usine de la Rance est de 0,24 GW.
La présence de l’usine a profondément modifié l’environnement de l’estuaire de la Rance. Les étales durent plus d’une heure, ce qui favorise la sédimentation. L’envasement du bassin constitue l’impact le plus notable.
Autres usines marémotrices
L’Usine de la Rance devait initialement servir d’installation pilote en vue d’une unité de 12 000 MW qui aurait comporter une digue englobant les îles Chausey (projet Chaussey).
Malgré le succès technologique de la Rance, des projets de ce genre sont difficiles à développer étant donné les incertitudes sur les impacts environnementaux.
La Rance est restée l’usine marémotrice la plus puissante au monde jusqu’en 2011, date à laquelle la centrale de 254 MW de Sihwa Lake a été mise en service en Corée du Sud. Une des raisons de ce projet est de mettre en communication le lac avec la mer pour évacuer la pollution présente dans le lac.
Figure 10: Vue de l’usine de Sihwa Lake – L’usine visible au premier plan fait 400 m de longueur et comprend 10 bulbes - Le lac est barré par une digue de 12km qui avait été construite en guise de protection contre les inondations
En Grande-Bretagne, l’estuaire de la Severn est soumis à de fortes marées (voir figure 3) et divers projets sont régulièrement proposés. Une première réalisation de 320 MW devrait été construite à Swansea grâce à une digue de 9,5 km encerclant un lagon artificiel de 11,5 km2, à condition que le financement soit garanti. L’avantage d’un lagon artificiel est qu’on ne modifie pas l’écologie d’un estuaire existant. (Projet de Swansea).
Figure 11: Vue du projet de Swansea dans l’estuaire de la Severn au Pays de Galles – Le lagon artificiel n’englobe pas les estuaires des rivières avoisinantes, ce qui devrait réduire l’impact environnemental.
Une hydrolienne est une machine hydraulique qui exploite l’énergie cinétique de la masse d’eau environnante. Elle peut être comparée à une éolienne sous-marine produisant de l’électricité à partir du courant d’eau.
II - Ressource énergétique des courants de marée
On verra au paragraphe suivant que seuls les courants ayant une vitesse maximale supérieure à 2 m/s, voire 2,5 m/s présentent un intérêt pour l’implantation d’hydroliennes. En mer, on observe des courants périodiques induits par la marée, ainsi que des courants océaniques qui sont relativement stables.
Les courants de marée sont importants dans les régions où le marnage est important, dans les zones où la configuration de la côte oblige la masse d’eau à accélérer.
Figure 1 : Carte des vitesses maximales des courants de marée dans la Manche. Les courants sont rapides là où la masse d’eau entrainée par l’onde de marée doit contourner des pointes, ou des îles et passer au dessus d’un haut-fond – Source : SHOM
Les sites présentant des courants rapides sont très localisés, comme on peut le voir sur l’exemple de la figure 1. La profondeur d’eau est toujours inférieure à 50 m. Les sites sont situés à une distance assez faible de la côte, ce qui simplifie le raccordement électrique. À titre d’exemple, lors d’une marée de vive-eau, la vitesse maximale du courant atteint m/s entre Aurigny et la Pointe de la Hague (Raz Blanchard). La vitesse maximale est quasiment proportionnelle à l’amplitude de la marée, donc au coefficient de marée.
Figure 2 : Vitesses du courant dans l’archipel de Molène et autour d’Ouessant 3 h après la pleine mer de Brest lors d’une marée de coefficient 103 – La carte représente une zone de 37km x 56km − Source : Previmer.org
La ressource théorique de l’énergie des courants de marée sur les côtes françaises est estimée à 6 000 MW. La ressource accessible en tenant compte des contraintes économiques et réglementaires est probablement la moitié de cette valeur.
En comparaison, les courants océaniques sont nettement moins rapides. Les figures 3 et 4 montrent la vitesse moyenne du Gulf Stream dans le détroit de Floride, à l'endroit où ce courant le plus rapide au monde atteint sa plus grande vitesse. On constate que la vitesse maximale est d’environ 1,8 m/s, ce qui est nettement moins rapide que les courants de marée dans les sites propices.
cm s-1
Figure 3 : Carte des vitesses du Gulf Stream et de la dérive Nord-Atlantique - Source : Cooperative Institute for Marine & Atmospheric Studies
Figure 4: Vitesse dans le détroit de Floride − La vitesse est maximale près de la côte de Floride en surface et beaucoup plus faible près de la côte cubaine
III - Conversion de l’énergie cinétique du courant
Considérons une hydrolienne avec un rotor de diamètre D immergé dans un courant dont la vitesse est V.
Figure 5: Schéma du courant agissant sur une hydrolienne
La surface du rotor est : S = п/4.D2 La masse d’eau qui traverse le rotor à chaque seconde est : M= ρ.S.V ρ : masse volumique du fluide L’énergie cinétique de cette masse d’eau est : E = ½ M.V2 = ½.ρ.S.V3*
La puissance de l’hydrolienne est une fraction de l’énergie cinétique:P = Cp.E avec Cp : coefficient de performance de l’hydrolienne.
On obtient : P = ½.Cp.ρ.S.V3 (1)
Le coefficient de performance Cp dépend de la qualité de réalisation du capteur d’énergie, par exemple le rotor de l’hydrolienne. On démontre (théorie de Betz) que dans une profondeur d’eau infinie, Cp est égal au maximum à la limite de Betz : 16/27 = 0,59. Cette théorie est fréquemment utilisée pour les éoliennes. Sans prétendre expliquer ici cette théorie, il suffit de considérer que le fluide qui entre dans le rotor d’un coté, doit en ressortir de l’autre coté. Le fluide sortant possède une vitesse non nulle, donc une énergie cinétique résiduelle qui n’a pas été soustraite par le rotor. En fait, dans le cas des hydroliennes, la profondeur d’eau n’est pas infinie, si bien que la théorie doit être révisée. La théorie détaillée sort du cadre de cette présentation. Les rotors réels des hydroliennes ont un Cp voisin de 0,40 à 0,45.
La figure 6 montre la relation entre la vitesse du courant et la puissance électrique pour une hydrolienne de 200 kW. Lorsque le courant est plus rapide que la vitesse nominale prise en compte pour le dimensionnement de la machine, la puissance est bridée à la valeur maximale. Ceci résulte du fait que le raccordement électrique est prévu pour une puissance donnée, qu’il n’est pas possible de dépasser.
Figure 6: Relation entre la vitesse du courant et la puissance pour une hydrolienne théorique de 200 kW dessinée pour délivrer sa puissance maximale pour un courant de 2,5 m/s − Lorsque le courant est inférieur à la vitesse nominale, la puissance varie selon le cube de la vitesse ; pour des vitesses supérieures, l’hydrolienne est pilotée pour maintenir la puissance électrique constante.
Le fait que la puissance soit proportionnelle au cube de la vitesse du courant entraine beaucoup de conséquences dans la conception des hydroliennes et la sélection des sites propices à l’exploitation de cette forme d’énergie.
Imaginons pour fixer les idées, qu’on désire obtenir une puissance électrique de 200 kW grâce à une hydrolienne. Le tableau suivant indique en fonction de la vitesse maximale du courant sur divers sites potentiels le diamètre du rotor.
Le tableau indique ce que seraient les données pour une éolienne ayant la même puissance. Le tableau indique aussi la force qui s’exerce sur le rotor de l’hydrolienne. Elle est donnée par la formule :
F = ½. Cf.ρ.S.V2 (2)
Tableau 1 : Dimensions d’une hydrolienne de 200 kW en fonction de la vitesse du courant prise en compte pour le dimensionnement − Cp = 0,40 − Cf = 1,0
Vitesse maximale du courant sur le site
Surface de captation du flux
Diamètre rotor circulaire
Poussée horizontale théorique
4 m/s
15,3 m2
4,4 m
125 kN
3 m/s
36,2 m2
6,8 m
167 kN
2 m/s
122,1 m2
12,5 m
250 kN
1,4 m/s
355,9 m2
21,3 m
357 kN
1 m/s
976,6 m2
35,3 m
500 kN
Éolienne : vent de 13 m/s
352,8 m2
21,2 m
42 kN
On constate que l’hydrolienne a une taille plus faible que l’éolienne de même puissance si le courant local est rapide. Sinon, c’est l’inverse. On lit fréquemment sur internet des annonces concernant l’invention de nouvelles hydroliennes capables d’exploiter les courants de faible vitesse. Le tableau ci-dessus montre que cet espoir n’est économiquement pas viable. Soulignons que ce tableau est calculé à partir de considérations sur l’hydrodynamique du fluide, et que la technologie mise en œuvre n’intervient pas dans le calcul, que le rotor soit une hélice à flux axial, à flux transverse ou une membrane ondulante. On constate aussi que la poussée horizontale est d’autant plus forte que la vitesse du courant est faible.
IV - Contrôle de la puissance – cas d’une hydrolienne avec rotor-hélice
La vitesse du courant est parfois inférieure à la vitesse nominale, parfois supérieure lors des grands coefficients de marée. Afin d’illustrer la manière dont il est possible de contrôler la puissance, considérons le cas d’une hydrolienne mécaniquement très simple, munie d’un rotor en forme d’hélice avec des pales non réglables, placée perpendiculairement au courant. La figure 7 montre que la puissance délivrée varie en fonction de la vitesse de l’eau, mais aussi de la vitesse de rotation. La puissance passe par un maximum quand la vitesse de rotation augmente, puis s’annule pour la vitesse dite de roue libre. La vitesse de roue libre est proportionnelle à celle de l’eau, si bien que la valeur du maximum de puissance suit une loi cubique similaire à la formule (1).
Figure 7 : Caractéristiques de puissance d’une hydrolienne munie d’un rotor en forme d’hélice en fonction de la vitesse du courant et de la vitesse de rotation — La puissance nominale est de 450 kW pour un courant de 3 m/s — La courbe 0-A-B représente la puissance fournie par une génératrice conçue pour délivrer 450kW au maximum – La partie 0-A est située légèrement à droite de la courbe des lieux du maximum de puissance pour des raisons de stabilité — (voir texte)
Lorsque la vitesse de l’eau est inférieure à la vitesse nominale (ici 3,0 m/s), la puissance varie comme le cube de la vitesse du courant. Le système électronique qui contrôle la génératrice doit régler la puissance produite en fonction de la vitesse de rotation d’une manière convenable. Supposons en effet que pour un courant de 2,5 m/s, on désire obtenir la puissance maximale théorique, égale dans ce cas à 300 kW, atteinte pour une vitesse de rotation de 13 rotations par minute (13 rpm). Un léger dérèglement risque de faire baisser la vitesse du rotor en dessous de cette vitesse optimale. On voit sur la figure 7 que si la vitesse tombe en dessous de 13 rpm, la puissance hydraulique du rotor diminue, si bien que la vitesse de rotation ralentit ; la puissance diminue encore, la vitesse baisse à nouveau, ainsi de suite jusqu’à l’arrêt complet. On parle de décrochage. Il est préférable de régler le système pour que la vitesse de rotation pour un courant de 2,5 m/s soit de 15 rpm, avec une puissance fournie à la génératrice de 250 kW. Grâce à cette disposition, une légère baisse de la vitesse de rotation conduit à une augmentation de la puissance hydraulique. Celle-ci est alors supérieure à la puissance extraite par la génératrice. La différence accélère le rotor qui revient à la vitesse normale de 15 rpm. À l’inverse, une accélération fortuite et passagère de la vitesse de rotation se traduit par une baisse de la puissance hydraulique. Le rotor est automatiquement freiné par la génératrice et revient à la vitesse initiale. Lorsque le courant de marée a une vitesse supérieure à la vitesse nominale de 3 m/s, le rotor tourne plus vite que 15 rpm, mais il est possible électroniquement de ne pas laisser la génératrice produire plus que la puissance désirée de 450 kW. En résumé, sur la figure 7, la zone située à droite de la courbe des maxima correspond à un fonctionnement stable, tandis que celle située à gauche est instable.
La figure 8 schématise la chaine électrique d’une hydrolienne équipée d’une génératrice à aimants permanents.
Figure 8 : Schéma simplifié de l’architecture électrique d’une hydrolienne à aimants permanents
La génératrice fournit un courant dont la fréquence varie avec la vitesse de l’eau. Ce courant alternatif est d’abord transformé en courant continu grâce à un étage de conversion électronique équipé de transistors de puissance, dits transistors bipolaires à grille isolée (en anglais : IGBT). L’énergie électrique sous forme de courant continu peut être stockée dans des super-condensateurs afin de lisser les fluctuations de puissance dues par exemple à l’action de la houle (voir figure 12 ci-après). Le courant continu est ensuite transformé en courant alternatif triphasé 50 Hz, en phase avec le réseau de transport continental pour permettre l’exportation de l’énergie. Un transformateur à rapport de tension réglable permet d’ajuster la tension de sortie à celle du réseau. On constate que la technologie moderne de l’électronique de puissance permet maintenant de concevoir des hydroliennes dont l’architecture mécanique est simple. Les fonctions sophistiquées permettant d’accommoder les variations de puissance sont obtenues par des moyens électroniques et non par des moyens mécaniques (par exemple pales réglables à incidence variable). La fiabilité de l’ensemble est améliorée.
V - Production énergétique d’une hydrolienne
Comme la vitesse du courant est proportionnelle à l’amplitude de la marée, la formule (1) montre que la puissance varie énormément d’une heure à l’autre et d’un jour à l’autre en fonction du coefficient de marée.
Pour illustrer la variation de la production d’énergie selon les jours, on considère un exemple théorique, avec une hydrolienne de 500 kW implantée dans un site typique de la Manche. La figure 9 montre la vitesse du courant sur ce site durant le mois d’octobre 2008.
Figure 9: Vitesse du courant entre le 01/10/2008 et le 31/10/2008
Figure 10 : Production durant une période de vive-eau — La puissance nominale est atteinte les 2 et 3 octobre — Les coefficients de marée sont trop faibles à partir du 4 octobre
Figure 11: Production durant une période de morte-eau
Le calcul de la production cumulée pour ce site pour toute l’année 2008 montre que l’hydrolienne aurait pu fournir un total de 1 516 073 kWh.
En divisant cette quantité par la puissance nominale de l’hydrolienne, on obtient :
1516073 kWh / 500 kW = 3032 h
Ce nombre d’heures constitue ce qu’on nomme la durée équivalente de fonctionnement pleine puissance.
Si on divise l’énergie par le nombre d’heures dans une année (8760 h), on obtient la puissance moyenne :
1 516 073 kWh / 8760 h = 173 kW
Le ratio 173 kW / 500 kW = 0,35 est nommé facteur de charge.
Ces valeurs sont similaires à celles obtenues quand on effectue les calculs pour une éolienne dans un site bien venté. L’énergie hydrolienne présente donc un facteur de charge similaire à l’éolien. Elle possède toutefois un avantage important : l’énergie des courants de marée est prévisible très longtemps à l’avance.
En mer ouverte, la houle se superpose au courant de marée. La combinaison des vitesses du courant et du mouvement cyclique induit une fluctuation de la puissance instantanée, comme on peut le voir sur la figure 12. Pour s’affranchir de cette influence, on peut stocker temporairement les surplus d’énergie grâce à des batteries ou des super-condensateurs (voir figure 8).
Figure 12 : Mesures de la vitesse instantanée du courant et de la puissance de l’hydrolienne — On note les variations dues à l’influence d’une forte houle lors de la mesure — Projet SEAFLOW Marine Current Turbines
VI - Cavitation
L’analogie avec les éoliennes connaît une limite à cause du phénomène de cavitation. L’eau qui circule à proximité d’une aile subit des différences de pression. Une surpression existe sous la face d’intrados, tandis qu’une dépression est présente sur l’extrados (voir figure 13). Or, si la pression locale devient inférieure à la pression pour laquelle l’eau s’évapore, des bulles de vapeur se forment.
Figure 13: Schéma du phénomène de cavitation
Figure 14 : Maquette de rotor d’hydrolienne dans un canal d’essai — Les zones brillantes à l’extrémité des pales sont les bulles de cavitation — À l’extrémité des pales, les tourbillons provoque le dégazage d’air dissous. Les chapelets de bulles visualisent la trace en hélice du passage des extrémités des pales dans l’eau.
La cavitation est gênante, car les bulles implosent dès que la pression ambiante remonte, en dehors de la zone de formation. Lorsque les bulles sont en contact avec la paroi, l’implosion provoque une onde de choc locale capable d’éroder la surface, ce qui conduit à une usure prématurée du matériel.
Figure 15 : Hélices de navire montrant des zones érodées par la cavitation.
Un moyen simple d’éviter la cavitation consiste à limiter la vitesse tangentielle en extrémité de pale. La dépression sur l’extrados est proportionnelle à l’énergie cinétique du fluide :
Δ P = ½ k.ρ.V2 (3)
Le facteur k dépend du profil de l’aile et d’autres facteurs.
La cavitation apparaît si :
P = ρ.g.z – Δ P < Pvap (4)
La pression de vapeur saturante Pvap ne dépend que de la température. Elle est très faible à la température ordinaire, par exemple 1,7 kPa à 15 °C, à comparer avec la pression atmosphérique qui est de 101 kPa. La formule (4) montre que la cavitation dépend de la profondeur (z) et de la vitesse de la pale (V).
VII - Influence de l’orientation relative du rotor avec le courant
On pourrait penser qu’il est important de conserver en permanence l’axe du rotor dans celui du courant, car l’orientation précise du courant varie au fil des heures. La figure 16 montre la rose des courants en divers points de la côte Bretagne-Cotentin, ce qui permet d’estimer la perte d’énergie dans le cas où le rotor est fixe dans l’espace, alors que la direction du courant est variable.
Figure 16 : Roses de courant en divers points de la côte Bretagne-Cotentin — Chaque diagramme local indique la variation de l’orientation et de la vitesse du courant au fil des heures — Le courant est essentiellement parallèle à la côte — Le site des Minguiers présente une rose elliptique − Source : SHOM.
On constate que les courants sont parallèles à la côte, dans un sens ou dans l’autre selon l’heure. Sur le site des Minguiers situé entre Jersey et Bréhat, la rose présente une forme elliptique, le courant transverse ayant une vitesse environ égale au tiers du courant maximal axial. Si on considère de nouveau la formule (1), on arrive à la conclusion que la puissance de ce courant transverse n’est que 4 % de la puissance maximale lorsque le courant est aligné avec le grand axe de l’ellipse. Ceci montre que même sur un site de ce genre, il n’est pas judicieux de s’efforcer d’orienter le rotor à tout instant. Un rotor fixe est quasiment aussi efficace qu’un rotor orientable.
VIII - Types d’hydroliennes
Lors de la conception d’une hydrolienne, plusieurs paramètres s’offrent au choix de l’ingénieur. Il est ainsi possible d’imaginer de nombreuses machines d’aspects fort différents. On décrit dans ce qui suit les principaux types de capteur destinés à transformer l’énergie cinétique de l’eau en énergie mécanique utilisable. Quelques exemples sont présentés ensuite, en tentant de montrer la démarche qui a conduit la conception dans chaque cas.
VIII - 1 Rotor à axe horizontal
Le rotor est une hélice placée perpendiculairement au courant. Ce genre d’hydrolienne est similaire à une éolienne qui tournerait dans l’eau.
Figure 17 : Schéma d’une hydrolienne équipée d’un rotor hélice perpendiculaire au courant.
La théorie des hélices enseigne que les pales du rotor se comportent comme des ailes qui interagissent avec le fluide à proximité (tourbillons de Joukowski). La figure 18 montre que lorsque le rotor tourne, les pales tracent dans le fluide des hélices entrelacées, si bien que l’ensemble de l’eau qui traverse le rotor interagit avec au moins une des pales. La vitesse de rotation est inversement proportionnelle au nombre de pales. Moins il y a de pales, plus la vitesse doit être élevée afin qu’aucune particule d’eau ne puisse traverser le rotor sans subir l’influence d’au moins une pale.
Figure 18 : Visualisation des tourbillons liés aux pales du rotor — Les pales tracent dans l’eau des hélices étroitement entrelacées Seuls les tourbillons d’extrémité des pales sont figurés pour la clarté de l’image — Le flux en aval du rotor est plus large qu’à l’amont car la vitesse aval est plus basse — On voit que certaines lignes de flux aval ont acquis une composante de vitesse tourbillonnaire, celle-ci est toutefois réduite, le flux aval reste essentiellement axial — Source : Oxford Energy.
Hélices carénées
Certaines hydroliennes qui utilisent le principe du rotor-hélice sont munies d’un carénage. La forme interne du carénage dessine un venturi convergent-divergent. La vitesse de l’eau au droit du rotor est supérieure à la vitesse environnante. Les promoteurs de la technique du rotor caréné insistent sur le fait que le diamètre de l’hélice est alors plus faible que pour un rotor libre, ce qui est exact. Toutefois, la puissance captée est dictée par le diamètre de l’entrée du convergent. On peut démontrer que cette puissance est identique à celle obtenue avec un rotor libre dont le diamètre serait égal au diamètre d’entrée (figure 19). Du point de vue économique, le coût du carénage dépasse largement l’économie faite sur le rotor proprement dit. De plus, si l’hydrolienne est implantée dans un site ouvert à l’influence de la houle, le carénage de grande dimension est soumis à de gros efforts hydrodynamiques qui obligent à augmenter la résistance mécanique de la structure et le coût des ancrages.
Figure 19 : Comparaison d’un rotor caréné et d’un rotor libre — La puissance captée est identique si les diamètres D sont égaux.
Le principe du rotor hélice est utilisé dans de nombreux types d’hydrolienne. On ne citera ici que quelques exemples représentatifs.
Sabella
L’hydrolienne est conçue dans un esprit de simplicité, avec le minimum possible d’éléments mobiles. Elle est posée sur le fond afin de se soustraire autant que possible à l’action des vagues, car les sites visés (par exemple Ouessant) sont situés en mer ouverte et balayés par les tempêtes. La nacelle est posée sur un tripode lesté. L’hydrolienne est fixe dans l’espace. L’ensemble est orienté lors de l’installation en tenant compte d’un compromis entre la direction du courant lors du flot et du jusant. Les pales sont fixées rigidement au moyeu. Le sens de rotation du rotor s’inverse avec le sens du courant. Les pales sont symétriques, car chaque face des ailes est alternativement extrados puis intrados. Ce type de profil est un compromis qui n’est pas optimum du point de vue rendement. Ceci est aisément compensé en donnant au rotor un diamètre légèrement plus grand (+5%) que celui d’un rotor théorique qui serait muni de pales optimales. Pour éviter la cavitation, le rotor tourne assez lentement et comporte 6 pales. On ne peut pas faire varier l’incidence des ailes. Par conséquent, la vitesse de rotation est variable, proportionnelle à la vitesse de l’eau. La génératrice est couplée directement au rotor, sans engrenages intermédiaires, ce qui augmente la fiabilité. Le courant électrique variable produit par la génératrice est transformé en courant triphasé 50 Hz grâce à des convertisseurs électroniques convenables (Voir figure 8). L’idée fondamentale de la conception est que la simplification mécanique doit permettre de minimiser les risques de panne et les besoins de maintenance.
Figure 20 : Vue de l’hydrolienne Sabella D10 lors de son installation — La nacelle est montée sur un socle tripode soigneusement lesté pour maintenir l’ensemble en position même lors des tempêtes — Source : Sabella SAS
Hydrolienne OpenHydro
L’hydrolienne comporte un carénage circonscrit au rotor. La présence du carénage améliore l’uniformité du flux sur le rotor. On voit sur la figure 21 que les pales sont fixées sur un anneau qui roule dans une gorge aménagée dans la surface interne du carénage. L’anneau porte les aimants permanents de la génératrice, tandis que les bobinages du stator sont intégrés dans le carénage. Dans cette conception, la génératrice fonctionne complètement immergée dans l’eau. Il ne peut donc pas y avoir de problème lié à une perte d’étanchéité. Par contre, la nécessité de maintenir l’isolation électrique des bobinages conduit à un grand entrefer entre les faces magnétiques des aimants permanents portés par l’anneau mobile et les bobinages du stator. La friction de l’eau emprisonnée dans l’entrefer lorsque l’anneau tourne engendre une perte d’énergie dont il faut tenir compte dans le calcul du rendement. L’électricité produite a une fréquence variable, en fonction de la vitesse du courant de marée. Des équipements électroniques intermédiaires permettent d’élaborer le courant aux caractéristiques exigées par le réseau. Des éléments mécaniques doivent assurer le centrage précis du rotor dans le carénage et compenser la poussée hydrodynamique axiale. La présence du carénage augmente les efforts dus aux vagues lors des tempêtes. Le lestage de l’ensemble doit être prévu en conséquence.
Figure 21 : Vue d’une hydrolienne OpenHydro sur sa barge d’installation — On voit les pales fixées sur un anneau mobile inséré dans un carénage — Le centre du rotor est vide — Source : DCNS
Hydrolienne Oceade
Cette hydrolienne est très semblable à une éolienne sous-marine, comme on peut s’en rendre compte sur la figure 22. Le rotor est positionné face au courant. La nacelle pivote lors de la renverse grâce à un propulseur auxiliaire. Les pales ont une incidence réglable à volonté. Les pales du rotor peuvent avoir un profil optimal offrant la meilleure efficacité hydrodynamique. La nacelle peut être amenée sur le site en flottaison, grâce à un remorqueur modeste (Voir figure 23). Le support tripode est apporté par un navire de travail, mais n’a pas besoin d’être relevé lors des opérations de maintenance. Durant le remorquage en surface, les pales doivent être orientées de façon à minimiser la trainée et éviter que la nacelle ne tourne. La facilité relative de l’installation de la nacelle permet d’intégrer dans celle-ci des équipements sophistiqués, notamment un multiplicateur de vitesse à engrenages. Comme la vitesse de rotation de la génératrice est grande, la taille de celle-ci est nettement plus faible que pour une génératrice tournant à la vitesse du rotor.
Figure 22 : Hydrolienne Oceade — Source : Alstom
Figure 23 : Remorquage de la nacelle d’un hydrolienne Oceade-2 des 3 pales restent immergées, elles doivent être « mises en drapeau » pour que le convoi puisse garder un cap et que la nacelle ne bascule pas — Le tripode support reste en place sur le fond — Source : Alstom
Hydroliennes flottantes
De nombreux modèles d’hydrolienne flottante ont été et continuent à être inventés et testés. La conception est guidée par le désir de faciliter l’installation et la maintenance.
Figure 24 : Schéma d’un hydrolienne flottante munie d’un rotor-hélice. Le flotteur est amarré sur le fond — Le rotor peut être sorti de l’eau pour la maintenance et le remorquage
L’hydrolienne est constituée d’un flotteur amarré sur le fond. La trainée du rotor provoque une traction sur l’ancrage, et le flotteur doit avoir une flottabilité suffisante pour ne pas être entrainé sous la surface par la traction de l’ancrage. Un flotteur en surface est sensible aux vagues, si bien que ce type d’hydrolienne ne convient guère que pour les sites relativement abrités de la houle du large. Ces machines sont en surface, ce qui implique que leur présence visible soit acceptée du voisinage, et qu’elles ne constituent pas une gêne pour la navigation.
Un exemple est fourni par l’hydrolienne développée par Scotrenewables. Le flotteur porte 2 rotors placés au bout de bras articulés. Les 2 rotors tournent en sens inverse afin de ne pas engendrer de mouvement latéral. Durant le remorquage, mais aussi en cas de tempête, les bras sont repliés. Pour minimiser la trainée durant cette phase, chaque rotor ne peut comporter que 2 pales, qui viennent se ranger sous le flotteur. Le faible nombre de pales par rotor oblige à soigner le profil des ailes pour éviter la cavitation. Un tel profil est non symétrique, si bien que l’hydrolienne doit pivoter lors de la renverse pour toujours faire face au courant.
Figure 25 : Hydrolienne flottante Scotrenewables — En position opérationnelle, les bras portant les rotors sont déployés sous le flotteur — En position remorquage ou survie, les rotors sont repliés — L’hydrolienne doit pivoter autour de son point d’ancrage lors de la renverse — Source : Scotrenewables
VIII.2 - Rotor à flux transverse
Ce type de capteur diffère de l’hélice, car les pales tournent autour d’un axe perpendiculaire au courant. Il est hérité des éoliennes Darrieus.
Figure 26 : Schéma d’une hydrolienne à flux transverse — Dans cette figure, l’hydrolienne est flottante, mais certains modèles sont posés sur le fond — On voit ici un avantage du rotor à axe vertical pour une hydrolienne flottante : la génératrice est hors de l’eau, sur le flotteur
Un rotor à flux transverse comporte plusieurs pales qui coupent le flux du courant 2 fois à chaque tour. La figure 27 montre que les pales sont accompagnées de tourbillons qui correspondent à l’apparition des forces hydrodynamiques, tantôt d’un côté du profil, tantôt de l’autre, de façon alternée. Ces tourbillons se détachent pour certaines valeurs de l’angle de rotation du rotor, avec une annulation soudaine puis une inversion du sens des forces sur la pale. Ce comportement est donc très différent de celui d’une hélice conventionnelle pour laquelle les tourbillons de Joukowski restent attachés aux pales. Le rendement effectif d’un rotor à flux transverse est inférieur à celui d’un rotor-hélice.
Figure 27 : Simulation numérique de l’écoulement dans un rotor à flux transverse — On voit 3 pales profilées qui tournent autour d’un axe dans le sens inverse des aiguilles d’une montre (sens antihoraire) — Les tourbillons bleus tournent dans le sens horaire, les rouges dans le sens antihoraire — À chaque tour, une pale forme un tourbillon dans un sens qui se détache brutalement, puis un autre dans le sens contraire qui se détache à son tour, etc. — Les tourbillons détachés sont emportés par le courant — Voir l’animation youtube
Si les pales sont verticales, l’inversion des forces se produit instantanément sur toute la pale, ce qui peut engendrer des vibrations et une fatigue prématurée. Le rotor doit être construit très rigide (voir exemple figure 28).
Figure 28 : Vue d’une hydrolienne avec 6 rotors transverses — L’hydrolienne comporte 2 axes verticaux tournant en sens inverse, portant chacun 3 rotors à pales verticales (visibles en jaune). Les 3 rotors sont décalés angulairement pour atténuer les variations d’effort — Notez le carénage et la structure (en vert) qui porte des paliers intermédiaires ce qui minimise les déformations des arbres — Source : CMN-Hydroquest
Une autre solution consiste à donner aux pales une forme en hélice. Le largage des tourbillons se produit progressivement le long de la pale, au fur et à mesure que l’angle de rotation critique est atteint, sans créer de vibration.
Figure 29 : Alexander M. Gorlov montrant la turbine à axe vertical qui porte son nom, munie de pales hélicoïdales
Rotor transverse à axe horizontal
Figure 30 : Hydrolienne à rotors transverses tournant autour d’un axe horizontal — La structure porte des paliers intermédiaires — Ces hydroliennes sont destinées aux sites ayant une faible profondeur d’eau — Source : RivGen
VIII.3- Capteurs oscillants
De nombreux autres modèles d’hydrolienne ont été inventés. On peut citer ici les hydroliennes avec aileron oscillant ou membrane ondulante. Ces dispositifs s’inspirent du mouvement des nageoires des poissons.
Figure 31 : Schémas d’hydroliennes avec capteurs oscillants, à aileron ou à membrane ondulante
De manière générique dans cette famille de capteurs, l’énergie est captée par une surface qui décrit un mouvement alternatif perpendiculaire au courant. Chaque oscillation fait apparaître une force qui est exploitée. La production d’énergie est non constante et s’annule 2 fois par cycle. Un stockage d’énergie de courte durée est obligatoire. Le sillage aval constitue une allée de Von Karman, formée de tourbillons alternés. Le flux de courant qui interfère avec le capteur est délimité par la largeur de cette allée. La fréquence optimale d’oscillation est déduite de la formule :
F(Hz) = 0,2.V/H (5)
Figure 32 : Schéma d’un capteur oscillant avec une allée tourbillonnaire de Von Karman dans le sillage
Les vagues sont un mouvement ondulatoire de la surface de la mer. Elles sont créées par le vent qui transfère de l’énergie de l’atmosphère dans la mer. Les phénomènes en jeu sont très compliqués, et les études théoriques se poursuivent encore maintenant. En un lieu et à un moment donné, la force des vagues définit ce qu’on nomme un état de mer. Celles-ci sont caractérisées par leur hauteur, leur période et la direction de leur propagation. Toutes les vagues ne sont pas de la même hauteur. Pour décrire un état de mer, on parle de hauteur significative des vagues Hs. En pratique, si on mesure toutes les vagues de crête à creux durant l’événement, on trouve qu’un tiers des vagues sont plus hautes que Hs et les autres plus basses. C’est pourquoi certains parlent aussi de H1/3 pour désigner la hauteur significative. La hauteur des vagues maximales est typiquement égale à 1,8 x Hs – Voir figure 1.
Figure 1 : Exemple de relevé des hauteurs significatives Hs et maximales Hmax Source : ELSAM
Plus le vent est fort, plus il souffle longtemps, plus la hauteur des vagues est importante. L’étendue de la surface marine sur laquelle le vent souffle est dénommée fetch. Celui-ci est un paramètre influant, comme on peut le voir sur la figure 2 qui donne la hauteur significative des vagues en fonction des principaux facteurs à condition que la profondeur d’eau soit suffisante. Ces valeurs théoriques correspondent à un état de mer dit développé. Si les paramètres sont plus faibles que ceux du diagramme, la hauteur des vagues est plus faible. Par exemple, pour un vent de 15 m/s soufflant durant 7 h, la hauteur des vagues est de 3 m à condition que le fetch soit au moins de 100 km. Par contre, si le fetch n’est que de 30 km, la hauteur des vagues sera de 2 m ; celle-ci sera d’ailleurs atteinte après 3 h. Si la profondeur d’eau est réduite, les phénomènes sont différents, comme on va le voir ci-dessous.
Figure 2 : Diagramme théorique donnant la hauteur significative et la période des vagues – Reproduction d’après Gröen et Dorrestein (1976)
La figure 2 doit être considérée comme une simplification de la réalité. Durant les fortes tempêtes, on observe parfois des vagues bien plus grosses que les autres. Voir figure 3. On observe dans certaines conditions des vagues monstrueuses, ou freak waves, parfois appelées aussi vagues scélérates, traduction directe du nom en anglais rogue waves. Elles atteignent 30m de crête à creux.
Figure 3 : Relevé des vagues enregistrées le 1 janvier 1995 à 15h20 sur la plateforme pétrolière Draupner en Mer du Nord – La profondeur d’eau sur le site est de 70 m – Une vague unique de 26 m crête à creux est survenue alors que l’état de mer avait une Hs de 8 m – Source : Draupner wave – en.wikipedia.org
Les vagues se propagent sur l’océan. Quand elles quittent la zone ventée qui leur a donné naissance, elles se transforment en un mouvement plus régulier qui est la houle. La houle est une onde qui agite la surface de façon périodique. Lorsque la profondeur est suffisante, les particules d’eau suivent des trajectoires circulaires, comme schématisé sur la figure 4.
Figure 4 : Schéma d’une houle se propageant de gauche à droite.
Les mouvements des particules d’eau sont des trajectoires circulaires dont le rayon de giration diminue avec la profondeur. Les flotteurs sur la surface visualisent le mouvement à différents instants.
La période de la houle T est le nombre de secondes qui sépare le passage de 2 crêtes successives. La longueur d’onde λ est la distance entre 2 crêtes successives. Elle est liée à la période :
λ = 1,56.T2 (m)
Le rayon de giration des particules en fonction de la profondeur z (au repos) est :
L’onde se propage à la vitesse C :
C = 1,56.T (m/s)
Les ondes longues se déplacent plus vite que les autres. Elles peuvent voyager sur des milliers de kilomètres. Si la hauteur de la houle au large dépasse 0,14 λ (par exemple parce que le vent souffle), la houle devient instable et déferle à son sommet, formant des «moutons». On remarque d’ailleurs sur la figure 2 que les grosses vagues ne peuvent pas avoir de courtes périodes. Plusieurs trains de houle créés en des endroits différents peuvent se rencontrer et se superposer. Une situation similaire existe lorsque le vent crée localement des vagues dont la direction est différente de celle de la houle provenant du large. On parle de mer croisée ou de mer hachée. Les états de mer correspondants sont dangereux pour la navigation.
Figure 5 : Exemple de mer croisée avec 2 trains de houle de directions différentes – Source : Waitwow.com
Lorsque la houle s’approche de la côte, la profondeur d’eau diminue. La proximité du fond modifie le mouvement de la houle à partir du moment où la profondeur est inférieure à la moitié de la longueur d’onde.
Figure 6 : Schéma de la houle en faible profondeur.
Les trajectoires des particules d’eau ne sont plus circulaires mais elliptiques. Sur le fond, l’eau suit un mouvement alternatif.
La vitesse de l’onde diminue lorsque la profondeur se réduit. Par faible fond, cette vitesse s’approche de la valeur limite :
- g : accélération de la pesanteur = 9,81m/s2 – z : profondeur d'eau locale (m)
On remarque que cette célérité ne dépend plus de la hauteur de la vague. La période restant inchangée, la longueur d’onde diminue aussi, si bien que l’énergie se concentre dans une vague plus courte mais plus haute.
Figure 7 : Schéma du comportement de la houle à l'approche du rivage
Houle océanique
La profondeur décroit, la célérité et la longueur d'onde diminuent. La hauteur de la vague augmente
Quand la cambrure de la vague est trop forte, le sommet déferle. De l'eau est projetée vers l'avant. Ceci dissipe de l'énergie. De l'énergie est aussi perdue à cause du frottement sur le fond
Le déferlement continu dissipe progressivement l'énergie de la vague dont la hauteur se réduit
L'énergie résiduelle est dissipée sur le rivage, soit sous la forme de brisants, soit de rouleaux en fonction de la pente du sol
Le déferlement provoque un courant d'eau vers le rivage en surface, accompagné d'un courant de retour au fond
La profondeur diminuant encore, la vague se cabre, puis lorsque la cambrure est trop prononcée, elle se brise en formant des moutons. L’eau située au sommet est propulsée vers l’avant. C’est ce mouvement qui permet aux surfeurs d’avancer aussi vite que la vague. L’énergie cinétique emportée par les moutons est dissipée dans la masse d’eau, mais leur quantité de mouvement génère un léger courant de la surface qui est dirigé dans le sens de propagation de la houle. Ce courant est bien entendu compensé par un courant de retour à proximité du fond dirigé vers le large. Ce mécanisme consomme progressivement l’énergie de la houle, dont la hauteur diminue au fur et à mesure qu’elle avance vers le rivage. La houle perd également de l’énergie par frottement sur le sol. A l’arrivée sur le rivage, toute l’énergie résiduelle est dissipée sous forme de brisants, parfois sous forme de rouleaux plongeants, selon la pente du fond. Le ralentissement de l'onde quand la profondeur d'eau diminue a pour effet de diffracter les vagues. Le front de la vague a tendance à modifier sa direction pour devenir parallèle à la côte. La houle se renforce autour des promontoires, et s'étale au fond d’une baie. Ce phénomène doit être pris en compte pour l’implantation des houlomoteurs.
Figure 8 : Réfraction de la houle autour d’une pointe. La houle qui vient du large en haut de l’image tourne autour de la pointe. Elle s’étale dans la baie et se concentre sur la pointe – Source : Surflanka
Les figures suivantes illustrent les phénomènes décrits ci-dessus pour la journée du 15 janvier 2015 au large de la Bretagne. La période des vagues était d’environ 14 secondes. La hauteur significative de la houle dépassait 9 m au large. Il s’agit d’une tempête relativement classique qui n’a rien d’exceptionnelle.
Figure 9 : Hauteurs des vagues en Mer d’Iroise lors de la tempête du 15 janvier 2015 – On remarque que la hauteur des vagues s’écroule à l’approche de la côte, car la profondeur d’eau diminue – Notez la diffraction à l’approche de la côte – Source : Previmer
Figure 10 : Agitation sur le fond – La vitesse alternative de l’eau s’accroit là où la profondeur est faible – Source : Previmer
Figure 11 : Amplitude du mouvement alternatif de l’eau sur le fond. – Source : Previmer
II - Ressource énergétique
On calcule l’énergie de la houle en intégrant l’énergie des particules d’eau sur toute la profondeur supposée suffisamment grande. Pour une houle régulière de hauteur H et de période T, on obtient la formule théorique suivante :
Dans laquelle :
ρ est la masse volumique de l’eau de mer (1024 kg.m-3) g est l’accélération de la pesanteur (9,81 m.s-2) Hs est la hauteur de la houle mesurée en mètres. Comme on suppose ici une houle régulière, donc toutes les vagues ont la même hauteur H, bien entendu égale à Hs T est la période de la houle en secondes. Le résultat E est en watts par mètre de crête (W/m).
Cette formule théorique est valable si la profondeur d’eau est grande, lorsque la profondeur est supérieure à la moitié de la longueur d’onde.
Si on fait le calcul des termes constants, on obtient :
E = 490. Hs2.T
En fait, une houle n’est que rarement régulière, mais est généralement la superposition de plusieurs ondes. La résultante est une houle dont la hauteur est Hs et la période apparente T. L’énergie est alors supérieure à celle d’une houle pure. Pour tenir compte de ce phénomène on utilise la formule empirique suivante si on calcule E en watts par mètre de crête :
E = 500. Hs2.T (W/m)
Si on désire exprimer la puissance en kilowatts par mètre de ligne parallèle à la côte, on a :
E = ½ .Hs2.T (kW/m)
Exemples :
Houle de 2m et de période 4s : 8 kW/m Houle de 3m et de période 6s : 27 kW/m Houle de 10m et de période 14s : 700 kW/m
Ces quelques valeurs soulignent la puissance considérable des vagues de tempête et expliquent pourquoi les installations destinées à récolter l’énergie des vagues doivent être conçues pour résister aux tempêtes.
L’énergie est la somme de l’énergie cinétique et de l’énergie potentielle de toutes les particules d’eau entrainées dans leurs trajectoires circulaires. Ceci amène une remarque importante : la moitié de l’énergie correspond à la composante verticale du mouvement, et la moitié à la composante horizontale. Si un système houlomoteur utilise le seul mouvement vertical de la houle, il ne peut exploiter que la moitié de la ressource. Pareil pour un volet oscillant qui n’exploite que le seul mouvement horizontal.
La carte de la figure 12 indique la puissance moyenne annuelle sur les mers du Globe. On constate que la ressource de la houle est abondante dans les zones tempérées balayées par les dépressions océaniques. Des études ont conduit à estimer la ressource théorique à 3 TW. Oceanor paper_OMAW_2010 (Assessessing the global wave energy potential) La ressource accessible serait de 0,5 TW, soit 10% de la consommation mondiale d’électricité. Aw energy
Figure 12 : Puissance moyenne des vagues au large des côtes – Source : A Global Wave Energy Resource Assesment – Andrew Cornett (2008)
Cette moyenne cache une grande disparité selon les saisons, en conformité avec la variation saisonnière des vents, comme on le voit sur la figure 13 qui montre la puissance moyenne des vagues en Mer d’Iroise au cours des divers mois de l’année.
Figure 13 : Puissance moyenne des vagues au cours de l’année – Source : Scientific Figure on ResearchGate. Available from: researchgate.net
Les houlomotrices doivent être adaptées aux vagues rencontrées sur le site d’implantation. Il est donc nécessaire de connaître la distribution statistique de la hauteur des vagues et des périodes associées. On parle du climat de vagues local. Les mesures sont réalisées par des bouées spécialisées ancrées sur le site pendant une durée d’environ 1 année. La figure 14 montre un exemple d’histogramme relevé au large de l’Ile d’Yeu. On remarque qu’il existe dans ce cas particulier 2 populations distinctes : les vagues dues au vent local de faible amplitude et la houle de plus grandes périodes. On constate ici aussi qu’il n’y a pas de hautes vagues ayant une courte période.
Figure 14 : Histogramme hauteur-période des vagues au large de l’Ile d’Yeu
III - Les systèmes houlomoteurs
L’énergie des vagues a depuis longtemps excité l’imagination des inventeurs. Demandez à un ingénieur d’imaginer une machine pour exploiter cette forme d’énergie, nul doute qu’il fera une proposition, probablement accompagnée d’un grand enthousiasme. On trouve sur internet une foison de concepts. Voir le site Aquaret. Une analyse réalisée en 1999 par l’université de Trondheim montrait qu’il y avait déjà plus de 1000 brevets sur le sujet. Une revue faite en 2013 est disponible sur le site Buch der Synergie (en allemand). On y relève 180 concepts différents. Il ne peut être question de les passer en revue ici.
Une machine houlomotrice subit l’assaut de 4 millions de vagues par an. La tenue des équipements à la fatigue est donc un aspect essentiel. Lors des tempêtes, les efforts auxquels il faut résister sont décuplés. Les machines doivent par conséquent être étudiées pour survivre aux événements extrêmes.
Tout concept doit satisfaire les fonctions suivantes :
captation de l’énergie du mouvement d’eau
transmission à un convertisseur d’énergie
stockage de l’énergie durant quelques secondes entre 2 vagues successives pour lisser la production
export de l’énergie utile vers les utilisateurs
Au coté de ces fonctions primaires, un projet houlomoteur doit aussi prendre en compte les impositions suivantes :
Capacités industrielles à proximité pour la construction, la mise à l’eau, l’installation sur le site
Raccordement au réseau électrique à terre
Permis de construction et d’exploitation après étude des impacts sur l’environnement
Méthode de maintenance, moyens navals à prévoir
Lors de la conception d’un système houlomoteur un grand nombre de degrés de liberté s’offrent au concepteur. Ceci explique la grande quantité de machines différentes inventées et testées en mer. Sans être exhaustif, on peut noter les paramètres suivants :
exploitation du mouvement vertical de la vague, du mouvement horizontal, de leur combinaison, du tangage
mouvement du capteur par rapport au fond, par rapport à un corps d’inertie immergé, un frein sous-marin, par rapport à d’autres points de la surface
énergie captée par un corps solide, par une membrane en élastomère, transmise à de l’air comprimé
installation sur la côte, fixée au fond de la mer, flottante dans une profondeur d’eau choisie
dispositions pour l’adaptation au climat de vagues local et au marnage
dispositifs pour ajuster la fréquence de résonance à celle des vagues
production d’électricité, d’eau douce, d’air comprimé, d’hydrogène, etc.
énergie convertie dans chaque capteur, ou collectée et transmise à un convertisseur commun sous forme d’eau pressurisée, d’air comprimé, d’huile sous pression, d’électricité
stockage de l’énergie sous forme de fluide sous pression, de volant d’inertie, dans des batteries ou des super-capacités
Pour illustrer ces généralités, examinons à titre d’exemple comment on pourrait dessiner une bouée houlomotrice, dite point absorber. On va voir dans ce qui suit 4 variantes possibles, sans être exhaustif. Des combinaisons entre les diverses dispositions constructives montrées ici peuvent être envisagées et ont souvent été testées. En effet, tous ces systèmes ont déjà été étudiés, parfois par plusieurs entrepreneurs en repartant de zéro à chaque fois.
Figure 15 : Bouée ancrée sur le fond
Le convertisseur d’énergie (en vert) est ici une pompe hydraulique qui fait circuler un fluide entre 2 réservoirs à des pressions différentes. La pression minimale du fluide permet de maintenir la ligne d’ancrage sous tension lorsque passe un creux de vague, du moins tant que le piston n’est pas à son point bas. Le fluide accumulé dans le réservoir à haute pression assure un stockage d’énergie entre les vagues. Le fluide retourne vers le réservoir basse pression au travers d’un moteur hydraulique qui transforme l’énergie en électricité. La pompe doit comporter une fin de course capable d’encaisser les efforts maximaux quand une vague de tempête submerge l’ensemble. Si plusieurs bouées sont implantées proches les unes des autres, le stockage et la conversion de l’énergie peuvent être centralisés. La technologie CETO est voisine de cette description. Voir Carnegie wave energy L’illustration montre l’implantation de nombreux équipements sur le fond. En alternative, ces équipements peuvent être intégrés dans le flotteur Un marnage important n’est pas compatible avec ce système.
Figure 16 : Flotteurs coulissants
La bouée qui capte l’énergie coulisse autour d’un flotteur colonne ballasté de manière à se tenir verticalement dans l’eau. Il faut que le mouvement vertical de la colonne soit très différent de celui de la bouée pour développer la force de captation d’énergie. Ceci peut être obtenu en donnant une grande taille à la colonne. On peut ajouter un frein hydrodynamique. La plaque est immergée à une profondeur suffisante pour ne pas être trop soumise à l’action des vagues. Des patins de guidage fonctionnant dans l’eau de mer compensent les efforts horizontaux des vagues et assurent le bon coulissage de la bouée. Les vagues de tempête introduisent de fortes tensions dans les amarres qui ne sont normalement pas sollicitées. Le convertisseur doit comporter une fin de course capable d’encaisser les efforts maximaux quand une vague submerge l’ensemble. Le système est compatible avec un marnage important. La technologie OPT correspond à la description faite ici. Ocean power technologies
Figure 17 : Flotteur combiné à une turbine sous-marine
Le mouvement du flotteur provoque un mouvement d’eau sur la turbine. Une plaque permet de renforcer la vitesse de l’eau dans le passage central. Dans les sites très énergétiques, cette plaque n’est pas nécessaire. La force de rappel est assurée par un lest. La turbine peut être bloquée lors des tempêtes. La maintenance nécessite la sortie de la turbine de l’eau. Le marnage n’a pas d’incidence.
Figure 18 : Flotteur combiné à une turbine aérienne
Ce concept aussi dénommé colonne d’eau oscillante flottante. Le mouvement des vagues fait entrer et sortir l’air alternativement de la chambre. Des turbines spéciales tournent toujours dans le même sens et exploitent les 2 sens du courant d’air. (Par exemple turbine Wells ou bien turbine à action bidirectionnelle) La bouée peut être ancrée au fond, auquel cas le système n’accepte pas de marnage important. Elle peut aussi être freinée par un frein hydrodynamique, solution convenable dans les sites avec fort marnage. Plusieurs chambres peuvent être assemblées sur un même flotteur. Voir Oceanlinx
On peut signaler ici la possibilité de rechercher une résonance entre la bouée et la houle. En choisissant soigneusement le volume immergé et la section de la bouée au niveau de l’eau, il est possible d’ajuster la fréquence de pilonnement, ce qui augmente la quantité d’énergie captée.
Figure 19 : Bouée pilonnante – Le volume immergé constitue une masse d’inertie qui conduit l’ensemble à résonner verticalement
La résonance en pilonnement nécessite un grand volume immergé, donc a priori un grand tirant d’eau. On peut réduire celui-ci avec des volumes additionnels sous l’eau comme dans la figure ci-dessus, ou en disposant la colonne résonante à l’horizontale, comme dans la figure suivante.
Figure 20 : Chambre à air avec colonne d’eau horizontale
Le mouvement de l’air est provoqué par le tangage – La longueur de la colonne d’eu favorise la résonance – L’expérience a montré que l’ouverture doit être située à l’arrière dans le sens de la propagation de la houle Malheureusement, sur la plupart des sites la fréquence de la houle est variable, si bien que la résonance est rarement efficace.
IV - Principales technologies houlomotrices
Parmi tous les concepts imaginés, on retrouve de façon récurrente quelques systèmes illustrés ci-dessous.
Chambre d’eau oscillante (en anglais : Oscillating Water Column)
Le principe est schématisé sur la figure 21. Une enceinte en béton armé est munie d’une ouverture immergée vers la mer, et d’une autre vers l’atmosphère à travers une turbine. Les vagues provoquent un mouvement alternatif de l’air confiné dans la chambre. Le passage de l’air dans la turbine est alternatif, mais le dessin de la turbine lui permet de toujours tourner dans le même sens (Turbine Wells ou turbine à action bidirectionnelle). La turbine travaille dans l’air, mais celui-ci est chargé d’embruns, et il faut la protéger contre la corrosion. En cas de tempête, un clapet ferme l’évent de la turbine pour éviter le passage de paquets d’eau sur les pales. La turbine tourne très vite. Un volant d’inertie stocke de l’énergie entre l’arrivée de vagues successives. La conception de la chambre doit être étudiée en fonction de la bathymétrie des fonds alentours, de la marée locale, du climat de vagues local. Il faut veiller à ce que le mouvement de l’eau qui ressort de la chambre ne perturbe pas trop l’énergie de la vague suivante. Plusieurs installations ont été construites sur ce principe.
Figure 21 : Chambre d’eau oscillante
A ce jour, la réalisation la plus remarquable est l’installation intégrée dans le nouveau brise-lames qui protège l’entrée du port de Mutriku en Espagne, dans le Pays Basque à 82 km d’Hendaye. Mise en route en 2011, elle comporte 16 turbines pour une puissance totale de 296 kW. La production est de l’ordre de 600 MWh/an. Voir Mutriku Wave Power Plant : from the thinking out to the reality 2009
Figure 22 : Vue du brise-lames de Mutriku
L’installation houlomotrice est située dans l’enceinte bétonnée dont la longueur est voisine de 100 m
Figure 23 : Tempête sur l’installation de Mutriku en cours de construction
À ce stade du chantier, seule la chambre à vagues est terminée, les turbines ne sont pas installées. On constate les projections d’eau dans les ouvertures, montrant l’importance de protéger les turbines dans ce type d’usine.
Figure 24 : Vue de la salle des turbines dans l’enceinte de Mutriku
La chambre ouverte sur la mer est située sous le plancher de la salle des turbines. Les leviers jaunes correspondent aux obturateurs de sécurité. La salle atténue le bruit émis dans l’environnement car les turbines qui tournent vite sont bruyantes ; notez le caisson en haut à droite qui contient un silencieux.
La production d’énergie ne suffit pas à justifier la construction d’une jetée de ce type. Par contre, s’il est prévu de construire une nouvelle jetée, l’option consistant à intégrer une génération d’énergie devrait être considérée.
Volet oscillant
La figure 25 illustre le principe. Le mouvement horizontal de l’eau fait osciller un volet (voir figure 6). Ce mouvement anime par exemple une pompe à eau, qui est envoyée à la côte vers une turbine, ou convertie en électricité sur place. Plusieurs volets sont parfois combinés les uns derrière les autres. Si le marnage est important, la puissance des vagues sur le volet baisse à marée haute. Pour la survie lors des tempêtes, le volet est abaissé et verrouillé sur l’embase. Ce concept nécessite moins de matériaux que beaucoup d’autres, puisqu’on ne cherche pas à faire flotter un volume. Il est adapté aux profondeurs d’eau allant de 10m à 20m selon les conditions de site.
Figure 25 : Volet oscillant
La société Fortum a developpé un système de ce type. 2 prototypes ont été installés au Portugal. En France, DCNS prévoit d’utiliser cette technologie pour un projet dans la Baie d’Audierne.
Figure 26 : Schéma du WaveRoller
L’embase comporte 3 volets – La conversion en électricité est effectuée sur place – Source : Fortum
Figure 27 : Vue du prototype WaveRoller durant l’installation.
Les volets sont rabattus durant cette opération – La longueur de l’embase est supérieure à la profondeur d’eau. L’immersion est réalisée en coulant d’abord une extrémité de l’embase, tandis que l’autre est encore en surface. Puis lorsque celle-ci a touché le fond, l’ensemble est ballasté pour être posé. Voir Aw-energy gallery
Bouées houlomotrices
De très nombreux prototypes ont été testés en mer. On peut citer la technologie CETO qui sera utilisée par EDF pour un projet à la Réunion. Voir Carnegie Wave Une autre version est représentée par Ocean Power Technologies (figure 27). Elle peut être déployée au large et contribuer à fournir de l’électricité à des systèmes isolés, tels que des installations de surveillance. Un modèle (APB350) délivre 350W en continu, grâce à une batterie stockant 20 à 60 kWh selon la ressource du site. La bouée a une masse de 10 t, une hauteur de 12,75 m et est munie d’un flotteur de 2,7 m de diamètre. Elle convient pour des profondeurs d’eau allant de 25 m à 1000 m.
Figure 28 : Vue d’une bouée OPT.
Un flotteur colonne (en noir) est ballasté de manière à se tenir verticalement en dépassant de la surface. Une bouée (en jaune) coulisse autour en suivant les vagues. Le mouvement relatif actionne un convertisseur d’énergie. Une plaque immergé amortit les mouvements verticaux de la colonne, ce qui augmente le mouvement relatif. Voir Ocean power technologies
Flotteurs articulés
Plusieurs flotteurs sont articulés entre eux. La captation de l’énergie est obtenue par la courbure de la surface qui déforme l’ensemble. Les vagues qui ont une grande énergie ont également une grande période, donc une grande longueur d’onde. La déformation de la surface est faible, donc il faut un train de flotteurs très long et de grand volume pour obtenir les forces suffisantes pour développer une puissance intéressante. L’expérience acquise a montré l’intérêt d’avoir au moins 3 flotteurs en série pour stabiliser l’ensemble face à la houle. Lorsque la vague incidente est très cambrée, le flotteur de tête plonge dans la vague, ce qui limite les efforts lors des tempêtes. Les mouvements des articulations actionnent des pompes à huile, le fluide sous pression faisant travailler un moteur hydraulique qui entraine un générateur. L’accumulation d’huile pressurisée assure la continuité de la production malgré l’intermittence des mouvements.
Figure 29 : Schéma d’un houlomoteur à flotteurs articulés
La réalisation la plus aboutie à ce jour est le PELAMIS. Un modèle de 750 kW a une longueur de 140 m et un diamètre de 3,5 m. Des prototypes testés au Portugal ont souffert des tempêtes, ce qui a conduit à renforcer et améliorer la technologie. La société porteuse de cette technologie a été dissoute pour des raisons financières. Toutefois, le gouvernement écossais a repris l’ensemble de la propriété intellectuelle car il considère que l’expérience acquise sera très utile pour la poursuite du développement de l’énergie houlomotrice.
Figure 30 : Vue d’un PELAMIS P2
Les articulations entre les segments récupèrent les mouvements de déformation verticaux et horizontaux – Source : Ocean Power Delivery Ltd
V - Autres utilisations de l’énergie des vagues
En dehors de la production d’électricité, l’énergie peut être utilisée pour produire de l’eau douce, Carnegie wave, voire de l’hydrogène. H2 ocean-project.eu
Signalons aussi que les vagues peuvent servir à la propulsion marine. Le meilleur exemple est fourni par la technologie Wave Glider.
Figure 31 : Vue d’un Wave Glider
L’action des vagues sur le flotteur de ce robot fait osciller les ailerons sous-marins, ce qui le propulse – Le cap est choisi grâce à un gouvernail sous le flotteur – Ce robot qui est également muni de panneaux photovoltaïques peut effectuer de longues campagnes de mesures en mer.
VI - Conclusions sur l’énergie de la houle
L’énergie de la houle représente une grande ressource, surtout au large. A proximité des côtes, la hauteur des vagues est plus faible, mais la profondeur d’eau est moindre et le raccordement à la terre est plus économique. De très nombreux dispositifs ont été testés ou sont en cours de développement. Selon les conditions du site, certains concepts sont mieux adaptés que d’autres. La capacité de survivre aux tempêtes est un facteur essentiel de la conception. Tous les équipements doivent résister à la fatigue aux contraintes du milieu marin. L’énergie des vagues restera toujours plus chère que d’autres formes d’énergie car les efforts mécaniques impliqués lors la captation sont très importants. Actuellement, des unités de petites puissances sont disponibles. Elles se justifient économiquement dans les régions dépourvues de moyens économiques de production d’énergie. Lorsqu’un nouvel ouvrage de génie maritime doit être construit en mer, l’intégration d’une production d’énergie houlomotrice mériterait d’être considérée.
Intérêts des eaux froides profondes en régions tropicales
Jacques Merle - juin 2014
Dans la région intertropicale (20°S – 20°N), occupée en surface par des eaux chaudes (plus de 25°C en général), des eaux plus froides remontent jusqu’à quelques centaines de mètres de de la surface, comme on peut le voir dans l’Atlantique sur une section méridienne de température réalisée dans le cadre du programme WOCE. (Figure 1 - Atlas WOCE). Á l’équateur, l’upwelling équatorial porte ces eaux froides jusqu’à la surface. Originaires des hautes latitudes où elles ont plongé dans les profondeurs autour de l’Arctique et de l’Antarctique, elles se réchauffent alors au contact du Soleil tropical. Les deux phénomènes : remontées dans les régions tropicales et plongée des eaux dans les hautes latitudes constituent le principal mécanisme de la «ventilation» de l’océan qui permet, entre autres, le transport de la chaleur, reçue en excès du soleil dans les tropiques, vers les hautes latitudes où au contraire elle est restituée à l’atmosphère, assurant ainsi l’équilibre thermique de la planète.
Figure 1 : Section thermique méridienne Woce (A 16) de 70° N à 55° S montrant les plongées d’eaux froides dans les régions Arctique et Antarctique et leur remontée dans la région équatoriale, souligné par le rectangle noir.
Mais cette remontée d’eaux froides à proximité d’une source de chaleur abondante affectant l’air et les couches superficielles océaniques des tropiques présente au moins un double intérêt :
Celui de rendre facilement accessible des eaux froides pour des usages divers, par exemple la climatisation ….etc.
Celui d’offrir une source d’énergie potentiellement exploitable, appelée Energie Thermique des Mers (ETM) en rapprochant ces eaux froides du gisement d’eaux chaudes superficielles ( entre 25 et 30 °C). Il a été montré que le potentiel offert par les océans tropicaux pour l’ETM avec un impact minime sur le champ thermique océanique est très grand (*), et que le risque de relâcher dans l’atmosphère le gaz carbonique abondant. dans l’eau froide est pratiquement négligeable.
L’exploitation de ces ressources sera d’autant plus facile et rentable que les eaux froides seront plus proches de la réserve d’eau chaude en surface. Or, c’est cette situation qu’on observe dans des régions particulières de la zone tropicale appelées les «Dômes d’eaux froides» où ces eaux froides, sous l’effet de la courbure du courant, remontent tout près de la surface. Dans l’océan tropical, les dômes d’eaux froides les plus connus sont situés sur les bords Est de l’Océan Atlantique (dôme de Guinée vers 10°N, et dôme d’Angola vers 10°S) et de l’Océan Pacifique (dôme de Costa Rica vers 10°N). A l’Ouest de l’Atlantique, il existe aussi deux dômes grossièrement symétriques par rapport à l’équateur mais qui ne portent pas de nom, l’un au Nord et au large de la Guyane (Vers 7°N) et l’autre au Sud au large du Nord-Est Brésil (Vers 5°S) (Figure 2).
Il existe une différence importante entre les dômes de bord Est et ceux de bord Ouest : à l'Est où la thermocline est peu profonde les structures caractéristiques des dômes d'eau froide (couche de surface homogène chaude surmontant une thermocline peu profonde) ne se manifestent au large de la Guinée et d'Angola qu'en été de leur hémisphère. A l'Ouest en revanche où l'eau chaude (jusqu’à 30°C) amenée par le courant équatorial sous l'action des alizés s'accumule, cette structure permanente maintient un gradient de plus de 20°C sur à peine 300 mètres de profondeur. Au Nord de l’équateur, les dômes de Guinée et de Costa Rica se prolongent vers l’Ouest par une crête formée par la convergence entre le Courant Équatorial Nord et le Contre Courant Équatorial Nord. Là aussi, on observe un gradient vertical de 20°C sur 300 m.
Figure 2 : La température moyenne à 300 mètres montrant des températures inférieures à 9°C en deux points qui marquent le cœur des dômes d’eaux froides de l’Atlantique tropical occidental. (Extrait de la réanalyse Glorys)
Outre ces dômes et ces crêtes qui présentent de très forts gradients verticaux de température, la région intertropicale est généralement caractérisée par des eaux chaudes (plus de 25°C) sur 50 à 300 m d’épaisseur, tandis qu’à une profondeur variable (de 300 m à 1000 m), on trouve de l’eau à moins de 5°C.
Il y a aussi, dans l’océan tropical, des zones dites d’upwelling où sous l’effet des alizés, les eaux froides atteignent la surface. Les plus connues se situent dans les courants des Canaries, de Benguela, de Californie et de Humboldt, mais on en trouve aussi, de dimensions plus modestes, lorsque la configuration de la côte, du vent et du courant le permettent, comme par exemple au Cabo Frio au Brésil.
Il est clair que les upwellings de bord Est sont favorables à une exploitation de l’eau froide à des fins de climatisation sur le continent africain. En revanche, avec en surface de l’eau dont la température dépasse difficilement 20°C il y est impossible d’atteindre le différentiel requis de 20°C pour une exploitation de l’ETM. Par contre les dômes froids occidentaux Nord et Sud permanents et particulièrement marqués dans l’océan Atlantique (Figure 2), cachés sous une thermocline située à moins de 150 m de profondeur seraient très favorables à une exploitation de l’ETM. Ceux de Guinée, d’Angola et de Costa Rica, éloignés des côtes et non permanents n’y sont guère propices. Les crêtes citées ci-dessus, nécessiteraient des installations totalement offshore encore difficilement concevables. Les dômes du Brésil et de Guyane, proches des côtes, pourraient accueillir des installations destinées à la fois à la climatisation et à l’exploitation de l’ETM.
En conclusion, on peut faire remarquer que ces structures hydrologiques particulières, susceptibles de constituer une source d’énergie, ou d'économie d'énergie, ne font pas encore l'objet d'un recensement systématique, décrivant entre autres leur situation, leur étendue, leur variabilité saisonnière et leur caractère plus ou moins stable dans le temps. Depuis près de 20 ans, des progrès considérables en modélisation du milieu océanique ont été accomplis et ont donné naissance à une activité nouvelle, comparable à la prévision météorologique, que l'on appelle l'«0céanographie opérationnelle». On ne peut que souhaiter que les responsables du programme européen "Copernicus" accordent une priorité suffisante à l'établissement d'une cartographie détaillée et périodiquement mise à jour des ressources en eaux froides profondes des régions intertropicales !
L’océan est un vaste réservoir d’énergie. Sous des formes diverses, cette énergie se manifeste par des phénomènes naturels dont la puissance a fasciné les hommes depuis très longtemps. Dès l’Antiquité, ils ont su utiliser les vents et les courants pour mouvoir leurs navires, et le flux des marées pour actionner leurs moulins. Au début de l’ère industrielle, ils ont conçu des machines utilisant l’énergie mécanique des vagues et la chaleur des eaux de l’océan pour servir leur industrie.
L’abondance relative et le faible coût, en termes financiers, de l’énergie produite par la combustion du charbon, puis du pétrole et du gaz, n’en a pas permis le développement.
Aujourd’hui, avec le constat de l’inadaptation de nos modes de production dits «traditionnels» aux exigences du développement durable, ces «Énergies Marines» renouvelables suscitent un regain d’intérêt et un consensus international semble établi selon lequel elles pourraient contribuer à satisfaire nos besoins en énergie primaire.
La valeur de référence de ces besoins est celle de la consommation mondiale actuelle d’énergie primaire, soit 10 milliards de tonnes d’équivalent pétrole par an (10 Gtoe/a) ou 120 000TWh/a)
Par ce dossier Océan et Énergie, le Club des Argonautes souhaite faire connaître les principes et l’état de l’art des techniques de conversion de l’énergie de ces phénomènes naturels en travail utile, et donner des avis documentés sur leurs avantages et leurs inconvénients.
Avant de décrire ces techniques, ce texte d' introduction est un essai pour apporter des éléments de réponse à la question :
«Quelle fraction de ces besoins l’exploitation des énergies marines pourrait-elle satisfaire de façon durable ?»
Les énergies marines
Les phénomènes marins susceptibles d’être utilisés pour produire de l’énergie sont nombreux. On se limitera ici à l’examen de ceux dont l’expérimentation a atteint le stade de la démonstration technique in situ à des échelles extrapolables jusqu’à plusieurs millions de watts (MW) et pour lesquels on dispose d’estimations de coûts de production réputés acceptables économiquement à plus ou moins long terme.
Le critère d’acceptabilité économique auquel on fait ici allusion est d’autant plus flou que l’évolution des coûts de l’énergie, à 20 où 50 ans, est très incertaine. Cette évolution dépend non seulement de celle des coûts de combustibles mais aussi du changement de la structure même des coûts de production avec l’introduction de taxes nouvelles et la prise en compte de coûts aujourd’hui «externalisés ».
Les phénomènes et les procédés de conversion retenus sont :
la marée avec les procédés du type «la Rance» et du type «hydroliennes» ,
le vent avec les éoliennes «en mer»,
la houle avec les « houlomotrices »,
la circulation générale des masses d’eaux avec le procédé « ETM - Energie Thermique des Mers ».
À l’exception des marées qui résultent de l’action de forces gravitationnelles tous ces phénomènes sont les résultats d’échanges d’énergie et de matière - de l’eau notamment sous ses trois formes : liquide, vapeur et glace - entre les masses d’eau océanique, l’atmosphère et les terres émergées. L’ETM puise dans la chaleur stockée dans l’eau de surface de l’océan tropical. Les éoliennes et les houlomotrices puisent dans le flux commun de l’énergie mécanique exprimée par le vent dont la source primaire est la même que celle de l’ETM :
C’est l’apport thermique du Soleil à la planète Terre.
Les technologies développées pour l’exploitation de ces phénomènes sont par nature réputées non polluantes dans la mesure où elles n’introduisent dans la biosphère ni énergie, ni composants chimiques nouveau ; elles n’impliquent que des perturbations des flux naturels d’énergie et de matière, des emprises sur le domaine maritime, des contraintes pour la navigation et d’autres nuisances, visuelles, voire auditives. La connaissance des effets de toutes ces perturbations, contraintes et nuisances est encore insuffisante pour évaluer avec précision les limites d’acceptabilité environnementale et sociale de l’exploitation de ces ressources. On ne pourra donc en tenir compte que de façon très incomplète dans ce premier essai.
Pour chacune des formes d’énergie on a quantifié :
La puissance moyenne du flux d’énergieexprimée dans l’ensemble des mers et des océans par le phénomène naturel «source ». On l’appelle RNG - Ressource Naturelle Globale. On a extrait les données pertinentes d’un document relativement récent de Rui Xin Huang du WHOI et,
La fraction de ce flux naturel que l’on estime pouvoir exploiter durablement à l’horizon des décennies à venir. On l’appelle PTE, Potentiel Techniquement Exploitable. Le manque d’expériences industrielles prolongées dans l’exploitation de la plupart de ces énergies ne permet pas d’apprécier de façon fiable les limites de leur « acceptabilité » en termes économiques, sociaux et environnementaux. Les valeurs des PTE utilisées dans cet essai ne sont donc encore que des ordres de grandeurs, des « best guesses », qu’il conviendra de préciser au fur et à mesure du développement de l’exploitation de ces nouvelles formes d’énergies .
Conclusions
L’objet de cet essai était d’approcher une réponse à la question:
«Quelle fraction de nos besoins en énergie l’exploitation des énergies marines pourrait-elle satisfaire de façon durable ?».
Une première réponse à cette interrogation est donnée par le tableau ci-dessous :
Formes d'énergie
Potentiel Techniquement Exploitable
PTE en TWh/a
Potentiel relatif
en %
ETM
100 000
82
Vent
&
Houle
18 400
&
1400
17
Marée
800
<1
Total
120 000
100
Les hypothèses et le détail de ces calculs sont donnés dans la page : "Calcul des potentiels exploitables des énergies marines"
Ces résultats montrent que l’exploitation des énergies marines pourrait assurer une production annuelle de 120.000 TWh. Ceci est de l’ordre de grandeur de la consommation mondiale actuelle d’énergie primaire.
Ces résultats montrent aussi que la ressource renouvelable en énergie marine est abondante mais n’est probablement pas démesurée par rapport aux besoins à venir de l’humanité. Il convient de prendre conscience de cette dimension pour ne pas laisser accroire que les générations futures pourraient puiser sans réserve dans l’océan toute l’énergie nécessaire à leurs besoins (hors extraction éventuelle des combustibles de la filière « fusion nucléaire »).
Le tableau montre que les contributions respectives des quatre formes d’énergies retenues varient dans une fourchette de 1 à 80. Ce résultat, sans occulter l’existence de «niches» propices à l’exploitation de la houle, du vent et des marées dans des sites particulièrement propices, met en évidence l‘importance du potentiel de production de l’ETM.
Il conforte la recommandation exprimée par le club des Argonautes pour que l’Europe, aujourd’hui absente du domaine de la recherche et du développement de cette filière, en fasse l’évaluation objective.
Mise à jour : juin 2012
Détails
Écrit par : Michel Gauthier
Catégorie : Dossier Energie
Captage de l'Energie Thermique des Mers et échanges de gaz carbonique avec l’atmosphère.
Yves Dandonneau
Afin d’exploiter la différence de température entre l’eau profonde et l’eau superficielle pour en retirer de l’énergie, on doit amener de l’eau froide, profonde, jusqu’à l’usine chargée d’effectuer cette transformation (centrale ETM pour «énergie thermique des mers»). Or, cette eau froide est riche en carbonates et en gaz carbonique, et elle présente donc, en cas de contact prolongé avec l'atmosphère, le risque d’émettre du gaz carbonique vers l’atmosphère, réduisant ainsi l’intérêt de cette source d’énergie puisqu’elle contribuerait elle aussi au réchauffement climatique global induit par l’effet de serre dû à ce gaz.
L’approche ci-dessous, combinant pompe physique et biologique, montre qu’il n’en est rien.
Que se passe-t-il si de l’eau profonde est portée en surface vers une centrale ETM ?
L’eau froide, riche en carbonates, a une pression partielle de gaz carbonique plus élevée que celle de l’atmosphère, et va donc émettre ce gaz vers l’atmosphère tant que la différence de pression partielle entre ces deux milieux ne se sera pas annulée. Pis, cette eau, exposée au rayonnement solaire, va se réchauffer ; or, pour une augmentation de 1 °C, la pression partielle de gaz carbonique de l’eau de mer augmente de 2,3 %. L’écart de température entre l’eau de surface et l’eau profonde requis pour un rendement satisfaisant d’une centrale ETM étant de l’ordre de 20 °C, une eau profonde dont la pression partielle de CO2 serait de l’ordre de 950 microatmosphères atteindrait ainsi, après avoir atteint la même température que l’eau de surface, une valeur proche de 1500 microatmosphères. L’évasion de gaz carbonique serait alors très intense.
Heureusement, l’eau profonde n’est pas seulement riche en carbonates, mais aussi en sels nutritifs. Ces derniers, en présence de lumière, favorisent une croissance végétale intense au cours de laquelle du carbone est fixé sous forme de matière organique, puis entraîné vers la profondeur avec les débris planctoniques. Ce processus tend à faire diminuer de façon importante la pression partielle de gaz carbonique, et tend donc à contrecarrer l’effet purement physique précédent. Ces transformations prennent place dans un milieu océanique où les masses d’eau se répartissent en fonction de leur densité, c'est-à-dire, dans les régions favorables à l’exploitation de l’ETM (les centres des océans tropicaux), en fonction de leur température. Ainsi, l’eau froide, quelque peu réchauffée après usage, mais toujours plus dense que l’eau chaude de surface, tendra à rejoindre un nouveau niveau d’équilibre en profondeur.
Il est difficile d’estimer la quantité de CO2 qui serait émise vers l’atmosphère par l’ETM…
C’est seulement lorsque de l’eau originaire de la profondeur se trouve en surface qu’elle peut émettre du CO2 vers l’atmosphère. Le dégazage n’est donc théoriquement possible que pendant une courte période, avant que l’eau ne commence à s’enfoncer, ou du fait du mélange turbulent d’une partie de cette eau avec l’eau de surface. Notons que ce mélange doit être évité dans la mesure du possible, car il aurait pour conséquence de refroidir l’eau de surface au voisinage de la centrale ETM, et par conséquent d’en réduire le rendement. Certains projets prévoient d’ailleurs pour éviter cela de canaliser l’eau refroidie usagée par un tuyau jusqu’à sa nouvelle position d’équilibre à plusieurs dizaines de mètres de profondeur. Au contraire, d’autres projets, nombreux, envisagent de garder en surface l’eau profonde après usage, afin de produire de la biomasse grâce à la lumière et aux sels nutritifs qu’elle contient. Dans de tels cas, on doit s’attendre dans un premier temps à un dégazage intense, puis, au fur à mesure que la photosynthèse piège le gaz carbonique, à une inversion du flux de CO2, vers l’eau mise en incubation en surface. Enfin, la structure verticale de l’océan est légèrement modifiée par une centrale ETM, qui refroidit une partie de l’eau de surface et réchauffe une partie de l’eau profonde. Ceci peut avoir une incidence à long terme, difficile à évaluer, sur les mélanges verticaux auxquels est soumis l’océan.
mais il est facile d’en estimer la limite supérieure.
La concentration en carbone inorganique total (TCO2 = carbonates + bicarbonates +CO2gaz) des eaux de surface dans les régions favorables à l’ETM correspond à un état d’équilibre entre l’océan et l’atmosphère. Il s’agit d’eaux qui ont dérivé longtemps à la surface de l’océan, qui s’y sont réchauffées, et dépourvues de sels nutritifs car ceux-ci ont été incorporés via la photosynthèse dans des formes vivantes, devenues débris organiques, et qui ont sédimenté vers la profondeur. Elles représentent l’état vers lequel vont tendre les eaux profondes remontées en surface pour l’exploitation de l’ETM, au terme d’une évolution qui leur fera perdre une quantité de carbone en excès :
Cexcès = Cprof - Csurf
où Cprof et Csurf sont respectivement les concentrations en TCO2 de l’eau profonde et de l’eau de surface.
Une part de ce carbone en excès va cependant être fixée par l’activité biologique permise par les sels nutritifs, notamment les nitrates. L’élaboration de la matière vivante s’opère en utilisant en moyenne 6,8 moles de CO2 pour une mole de nitrate. Finalement, le carbone émis vers l’atmosphère sera donc :
Cémis = Cexcès – 6,8 Nitrateprof
Où Nitrateprof est la concentration en nitrate de l’eau à la profondeur où est puisée l’eau froide pour la centrale ETM.
Ce calcul simple effectué dans des régions où la température de l’eau de surface dépasse 25 °C, et en utilisant les concentrations en TCO2 et en nitrate (1) de l’eau profonde à une température inférieure à 5 °C, donne les résultats suivants :
Nombre de données
Potentiel d’émission de carbone
Atlantique nord
150
40 µmole kg-1
Atlantique sud
178
-65 µmole kg-1
Océan Indien
392
125 µmole kg-1
Pacifique nord est
49
131 µmole kg-1
Pacifique nord ouest
45
131 µmole kg-1
Pacifique sud est
143
38 µmole kg-1
Pacifique sud ouest
15
91 µmole kg-1
L’émission pour une production d’électricité de 1 MWh par une centrale ETM nécessitant 9 000 m3 d’eau profonde (2), serait donc, au maximum, de 16, -26, 50, 52, 52, 15 ou 36 kg de CO2(3) selon les bassins océaniques.
Il est à noter que dans l’Atlantique sud, les gradients respectifs de nitrate et de TCO2 sont tels que l’exploitation de l’ETM y constituerait un puits potentiel de carbone pour l’atmosphère et non pas une source ?
Par comparaison, une centrale thermique fonctionnant au gaz émet au moins 500 kg de CO2 / MWh, et une centrale au fuel lourd en émet beaucoup plus. En fait, ces émissions maximales de l’ETM ne sont à considérer que dans les cas où l’eau froide serait gardée en surface pour produire de la biomasse. Dans le cas d’une centrale purement ETM, les émissions seraient beaucoup plus faibles. L’approche ci-dessus est basée sur le couplage entre nitrates et carbone. Or, lorsque les nitrates ont été épuisés par la photosynthèse, il reste environ 0,2 µmole kg-1 de phosphates dans l’eau de mer. Certaines cyanobactéries marines photosynthétiques (en particulier, les Trichodesmiums, sont capables de fixer du carbone en l’absence de nitrates en utilisant l’azote atmosphérique. Les 0,2 µmole kg-1 de phosphate résiduel pourraient ainsi fixer 22 µmoleC kg-1, à déduire du tableau ci-dessus. Toutefois, la croissance de ces cyanobactéries est très lente, et n’épuise généralement pas la totalité des phosphates en surface. La concentration moyenne en phosphates dans les zones examinées reste en effet de l’ordre de 0,15 µmole kg-1.
En synthèse :
Cette étude établit, pour la première fois à notre connaissance, les résultats suivants concernant le bilan carbone de l'ETM, selon de destin de l'eau froide profonde après usage :
en cycle fermé avec ré enfouissement naturel ou forcé, il n'y a aucun contact avec l'atmosphère et aucun risque de dégazage;
lorsque l'eau froide profonde est volontairement maintenue en surface après usage, et qu'elle a donc l'occasion de libérer dans l'atmosphère le CO2 qu'elle contient, l'effet de la pompe biologique est de réduire considérablement cet excès de gaz carbonique qui devient négligeable au regard de la production d'énergie par combustible fossile dans les zones tropicales;
dans l'Atlantique sud, compte tenu des gradients respectifs de nitrate et de TCO, l’exploitation de l’ETM constituerait même un puits potentiel de carbone.
(1) les données utilisées pour ces estimations sont celles archivées au CDIAC. Retour
(2) Cette estimation est celle proposée dans l’ouvrage de William H. Avery et C. Wu : "Renewable Energy from the Ocean: A Guide to OTEC", Oxford University Press, New York. Elle est donnée ici à titre indicatif car elle dépend de nombreux facteurs tels que l’efficacité des échangeurs de chaleur, le choix du fluide de transfert etc… Retour
(3) Quantités obtenues en multipliant les chiffres du tableau par 9 106 (pour 9 000 m3) puis en les divisant par 106 (afin d’obtenir des moles de carbone) puis en multipliant par 44 10-3 (pour obtenir des kg de CO2). Retour
Nous utilisons des cookies afin de vous proposer les meilleurs services possibles. Si vous déclinez l'utilisation de ces cookies, le site web pourrait ne pas fonctionner correctement.
Tout accepter
Tout décliner
Analytique
Outils utilisés pour analyser les données de navigation et mesurer l'efficacité du site internet afin de comprendre son fonctionnement.



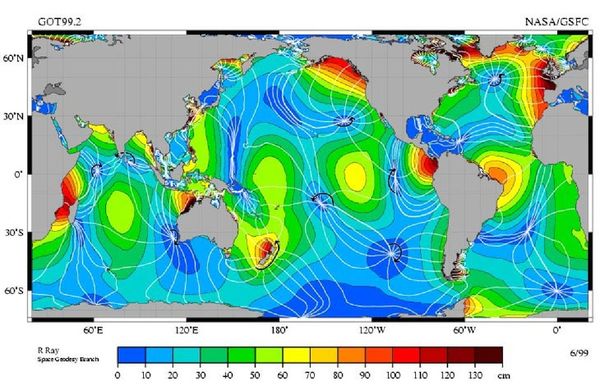











 cm s-1
cm s-1





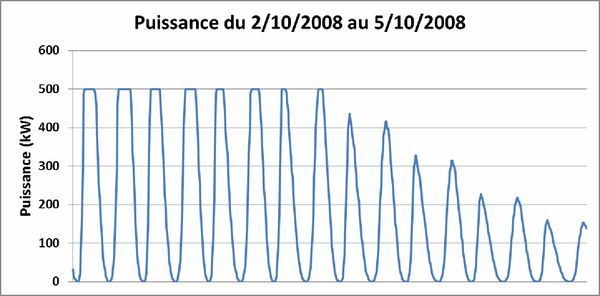

















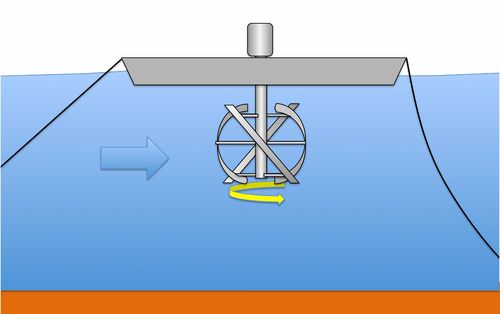






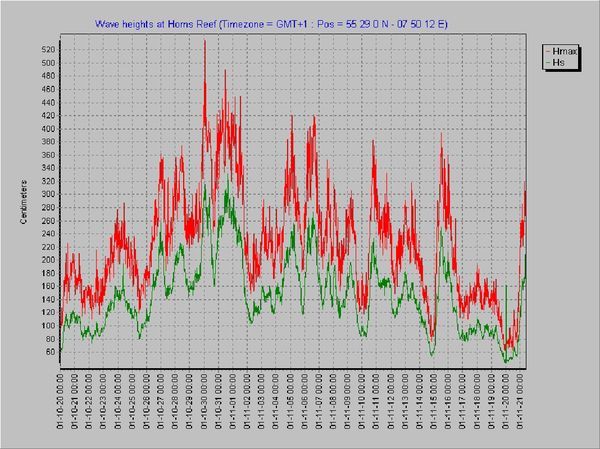
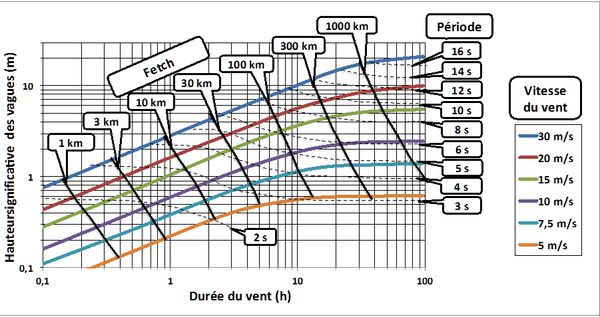

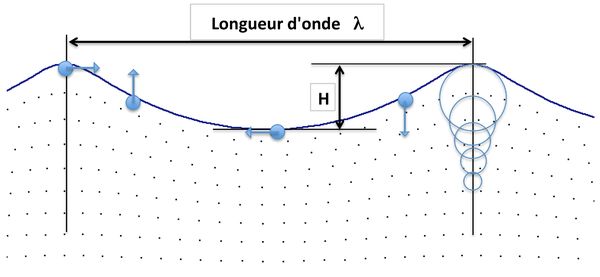


 - g : accélération de la pesanteur = 9,81m/s2 – z : profondeur d'eau locale (m)
- g : accélération de la pesanteur = 9,81m/s2 – z : profondeur d'eau locale (m)

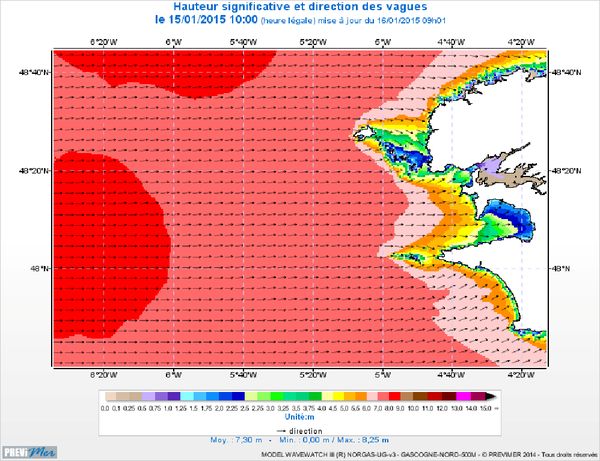
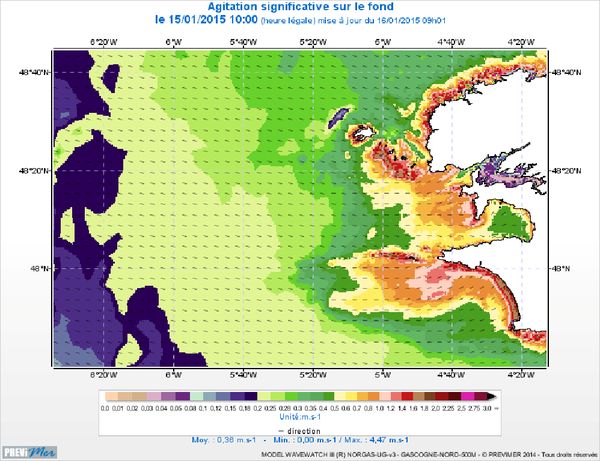
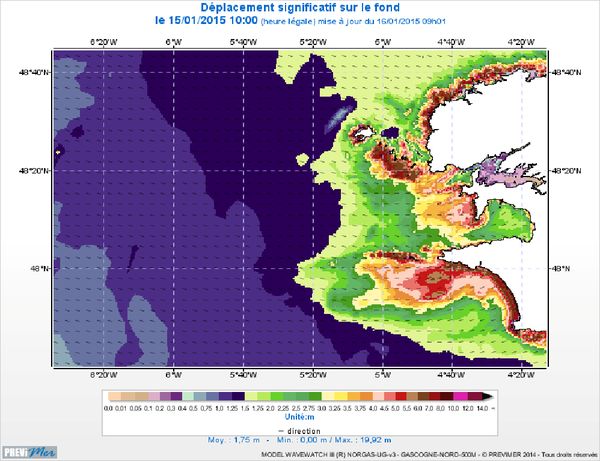
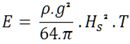




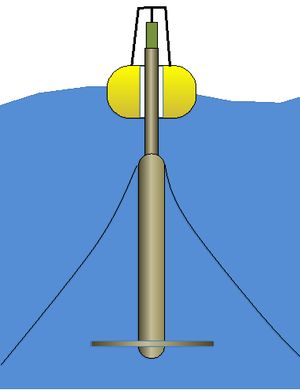
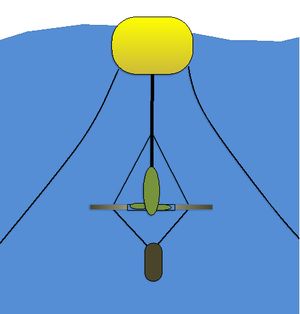
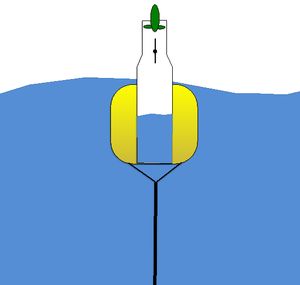
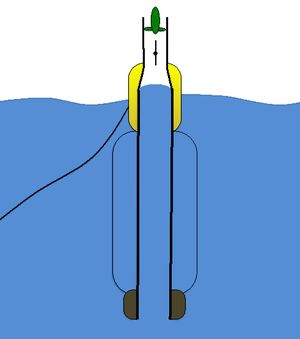
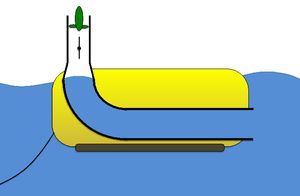
 A ce jour, la réalisation la plus remarquable est l’installation intégrée dans le nouveau brise-lames qui protège l’entrée du port de Mutriku en Espagne, dans le Pays Basque à 82 km d’Hendaye. Mise en route en 2011, elle comporte 16 turbines pour une puissance totale de 296 kW. La production est de l’ordre de 600 MWh/an. Voir
A ce jour, la réalisation la plus remarquable est l’installation intégrée dans le nouveau brise-lames qui protège l’entrée du port de Mutriku en Espagne, dans le Pays Basque à 82 km d’Hendaye. Mise en route en 2011, elle comporte 16 turbines pour une puissance totale de 296 kW. La production est de l’ordre de 600 MWh/an. Voir



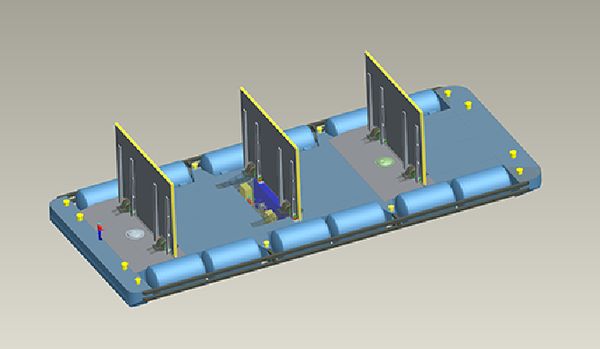

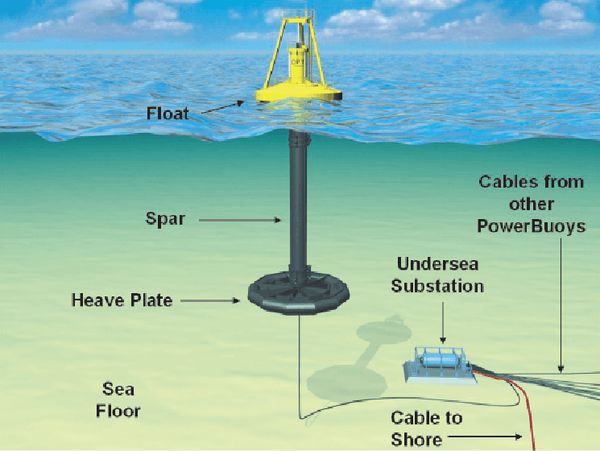
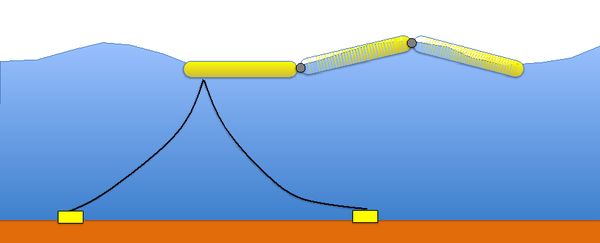

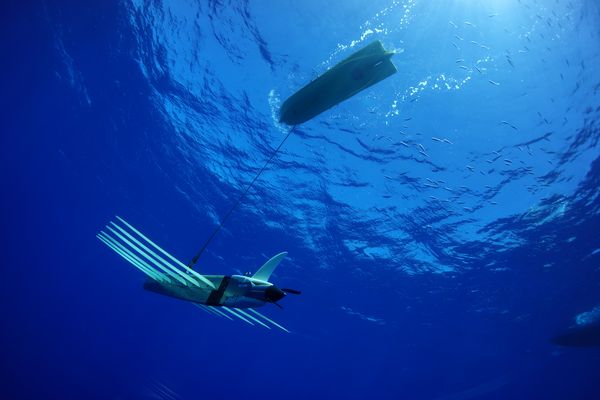
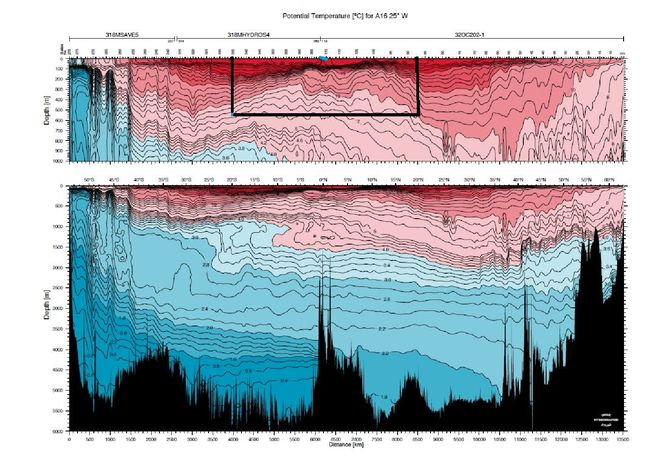
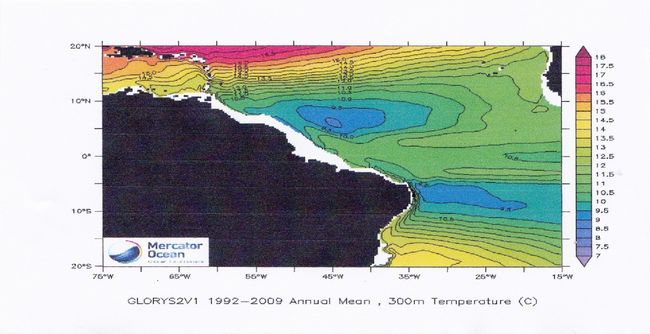
 L’océan est un vaste réservoir d’énergie. Sous des formes diverses, cette énergie se manifeste par des phénomènes naturels dont la puissance a fasciné les hommes depuis très longtemps. Dès l’Antiquité, ils ont su utiliser les vents et les courants pour mouvoir leurs navires, et le flux des marées pour actionner leurs moulins. Au début de l’ère industrielle, ils ont conçu des machines utilisant l’énergie mécanique des vagues et la chaleur des eaux de l’océan pour servir leur industrie.
L’océan est un vaste réservoir d’énergie. Sous des formes diverses, cette énergie se manifeste par des phénomènes naturels dont la puissance a fasciné les hommes depuis très longtemps. Dès l’Antiquité, ils ont su utiliser les vents et les courants pour mouvoir leurs navires, et le flux des marées pour actionner leurs moulins. Au début de l’ère industrielle, ils ont conçu des machines utilisant l’énergie mécanique des vagues et la chaleur des eaux de l’océan pour servir leur industrie.