Madeleine Zaharia, Yves Dandonneau, décembre 2020.
Remerciements à Pierre Yves Le Traon de Mercator Océan pour la relecture de cet article et les compléments apportés.
III - Quels systèmes de mesures ?
V - Quelles avancées technologiques ?
I - Introduction
Les mesures et observations de l'océan "In-Situ" ne datent pas d'aujourd'hui.
C'est la pose du premier câble télégraphique sous-marin en 1851 entre la France et la Grande Bretagne qui a fait prendre conscience de la nécessité de mieux connaître les fonds marins (topographie, température, sédiments, courants).
L'expédition britannique du navire Challenger de 1872 à 1876, avec ses quelques 400 stations de mesures réparties dans les océans Atlantique, Pacifique et Indien fut la première à réaliser de véritables observations de l'océan. Ce fut un succès et le début de la science "océanographique".
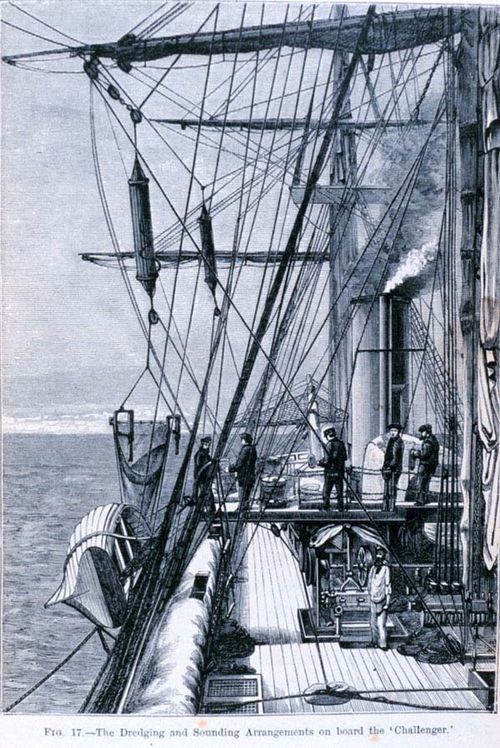
HMS Challenger Plateforme instrumentale
D'autres expéditions ont suivi mais les moyens dont on disposait rendaient les campagnes de mesures et d'exploitation très longues. Il a fallu attendre le milieu du 20ème siècle et ses formidables progrès technologiques notamment en matière de communication spatiale pour accéder à une connaissance dynamique des océans.
Depuis la fin des années 60, l'électronique et sa miniaturisation ont permis de faire des mesures océanographiques In Situ de plus en plus précises et en permanence.

Origine CNES
À la fin des années 70, la mise en place du système de collecte de données et de localisation par satellite à couverture mondiale, Argos, a donné aux mesures In Situ une dimension supplémentaire : la faculté d'être disponibles quasiment en temps réel dans tous les laboratoires concernés de la planète.
Ce système a été mis au point dans le cadre d'une collaboration Franco-Américaine entre le CNES (Centre National d’Études Spatiales) et la NASA puis la NOAA (National Ocean and Atmospheric Administration).
Il est exploité en France par CLS (Collecte et localisation par Satellite).
II - Quelles mesures in situ ?
Il existe une grande diversité de paramètres hydrologiques mesurés in situ : température, salinité, pression, conductivité, courants, paramètres physico-chimiques... ayant des applications dans des domaines aussi variés que l'océanographie, la biologie, la météorologie, la climatologie, la sismologie, plus récemment la biogéochimie. Ces paramètres hydrologiques constituent aussi un outil de base pour l'étude du fond des océans pour la paléoclimatologie et le paléomagnétisme...
L'océanographie opérationnelle utilise les profils de température et de salinité et les mesures de vitesses le long des trajectoires de flotteurs qui viennent compléter les données obtenues par satellites.
Voir Mercator océan, les composantes systèmes
III - Quels systèmes de mesures ?
Mesures du réseau Argo
Les mesures océanographiques In Situ sont effectuées par des instruments de mesures en surface ou immergés (en profondeur depuis la sub surface jusqu'au plancher océanique). Les mesures sont faites, soit lors de passage de navires océanographiques ou même marchands, soit par des systèmes automatiques, fixes ou dérivants.
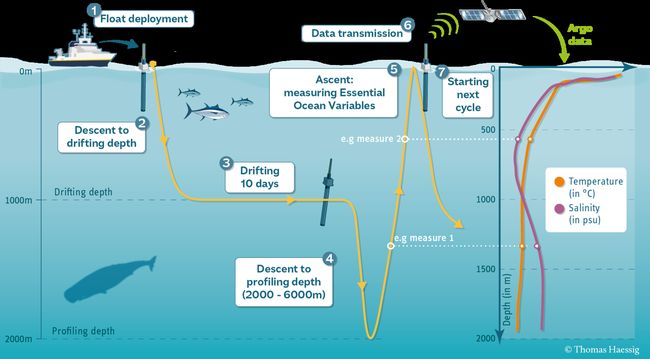
Crédit Euro-Argo ERIC
Les navires larguent au bout d'un câble à la fois mécanique et électrique, des sondes qui permettent de mesurer les paramètres hydrologiques sur un profil vertical de la surface jusqu'au fond. Il s'agit des bathysondes CTD (conductivité pour la mesure de la salinité, température, profondeur). Une bathysonde peut être munie de capteurs additionnels (turbidité, chlorophylle, oxygène dissous); elle est souvent montée sur un dispositif de prélèvement d'eau de mer nommé "rosette" (barillet portant des bouteilles de prélèvement dont la fermeture peut être commandée de la surface). Les échantillons recueillis sont utilisés pour étalonner les capteurs de la bathysonde et mesurer d’autres paramètres.
Les bouées fixes (encore appelées bouées ancrées, ou mouillages) entrent dans la catégorie des capteurs dit "Eulériens" et permettent, en un lieu donné, de suivre l'évolution des paramètres océaniques tels que température, salinité, courants, et paramètres biogéochimiques, en fonction de la profondeur et du temps.
Les bouées et flotteurs dérivants entrent dans la catégorie des capteurs dit "Lagrangiens" : ils évoluent librement au gré des courants. En fonction de leur situation, ils donnent des indications sur les courants en surface (flotteurs de surface) et en profondeur (flotteurs de subsurface pouvant être localisés acoustiquement en profondeur ou simplement localisés quand ils remontent en surface à intervalles réguliers). D’abord destinés à mieux connaître la circulation générale, les flotteurs de subsurface se sont peu à peu transformés en profileurs automatiques (profileurs Argo) en fournissant régulièrement des profils de température et salinité entre la surface et 2 000 m d’immersion. Plus récemment, ont été développé des flotteurs pouvant descendre jusqu'à 4 000 m de profondeur, certains étant conçus pour aller jusqu'à 6 000 m (Deep Argo). De nouveaux capteurs biogéochimiques (oxygène, nitrate, chlorophylle, pH, carbone particulaire, éclairement) ont été ajoutés sur des versions plus complexes de ces flotteurs (BioGeoChemical Argo).

Réseau Pirata. Origine IRD. Jacques Servain
Il existe une grande diversité de mesures avec des moyens et procédés différents.
Les navires océanographiques sont des moyens lourds nécessitant une importante intervention humaine, donc coûteux.
Le recours aux navires de commerce permet de répéter à moindre coût des observations dont l’exécution est aisée (XBT, température de surface, salinité) sur de longues lignes de navigation.
Les mouillages sont aussi coûteux car il faut un bateau pour aller les poser, les entretenir et les rechercher.
Les flotteurs dérivants sont moins onéreux, ils nécessitent un bateau pour leur mise en place initiale mais ont ensuite leur autonomie qui peut aller jusqu'à 5 ans.
La quasi totalité de ces points de mesure est maintenant équipée de balises Argos ou Iridium (avec capteur GPS) pour la localisation et la transmission des données. Les données sont transmises à un centre de traitement qui les met à disposition des utilisateurs en temps quasi réel.
Mesures complémentaires de celles du réseau Argo
Les animaux marins
Les grands mammifères marins qui, pour se nourrir, effectuent fréquemment des plongées à de grandes profondeurs, peuvent transporter des capteurs de température, de salinité et de profondeur, et aussi de concentration en chlorophylle et en oxygène. Ceci est rendu possible, depuis 2004, grâce à la miniaturisation des capteurs.
Lancée à l'initiative de Christophe Guinet du Centre d'études biologiques de Chizé (CNRS), une opération de collecte de données océanographiques utilise des éléphants de mer qui, avec ces capteurs collés sur leur tête, effectuent des plongées très profondes, jusqu'à plus de 2000 m, au cours de leurs longues migrations dans l'Océan Antarctique. Les atouts de cette opération sont d'une part de fournir des données dans une région éloignée et difficilement accessible, et d'autre part de plonger plusieurs fois par jour jusqu'à plus de 1000 m de profondeur, alors que les flotteurs ARGO n'effectuent qu'un seul profil vertical de mesures tous les dix jours. Ainsi les éléphants de mer récoltent environ 80 % des données de température et de salinité dans cet océan, localisées le long de leur trajet migratoire qui, pendant sept mois chaque année, les mène à partir des îles Kerguelen à explorer une vaste zone comprise entre 70 °E et 100 °E, et 45 °S à 65 °S.
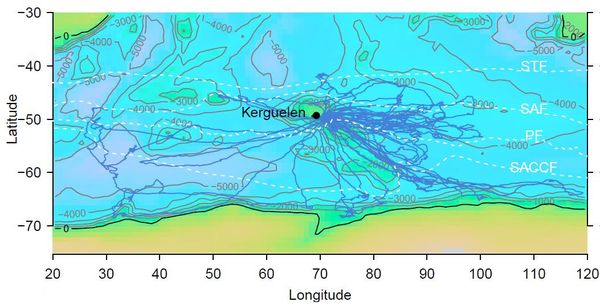
Suivi ARGOS de 26 Éléphants de Mer se reproduisant sur les îles Kerguelen
(Mathieu Authier, 2011)
Les résultats des mesures sont transmis vers le site CORIOLIS et vers le centre de données international MEOP via le système ARGOS lorsque les éléphants de mer gagnent la surface. Entre 2004 et 2011, 125 000 profils de température et 28 000 de salinité ont ainsi été collectés par 154 éléphants de mer et transmis en temps quasi-direct à Mercator, le modèle français européen de l'océanographie opérationnelle.
D'autres programmes ont été mis en place ces dernières années qui permettent, comme celui décrit dans l'article ci-dessus, de compléter les observations dans les endroits où le réseau Argo ne peut aller :
Les"gliders" ou planeurs sous-marins
Le glideur est un véhicule de forme hydrodynamique qui se déplace dans l'eau de manière autonome. Il se présente sous la forme d'une torpille de longueur 1,50 m environ et pèse 50 à 60 kg.
Il se déplace grâce à des variations cycliques de sa flottabilité. Il commence par plonger lorsque son ballast se remplit d'eau, en conséquence sa flottabilité diminue. Ses ailes donnent alors naissance à une force de portance qui lui permet de planer. Pour remonter, il vide son ballast. Il se déplace ainsi en suivant une trajectoire en forme de ligne brisée.
Il est équipés de capteurs qui permettent d’acquérir des données océanographiques tels que paramètres physiques et biogéochimiques, comme la température, la salinité, l'oxygène, la chlorophylle,... avec une bonne résolution spatiale (tous les km pour un profil allant jusqu'à 200 m de profondeur, et tous les 5 km pour un profil à 1 000 m).
À fréquence régulière, il remonte à la surface, les données enregistrées pendant la plongée sont alors transmises et collectées à terre en temps réel via une liaison satellitaire, Iridium ou Argos. Le pilotage du glider se fait par le même canal.
Il peut sillonner les océans pendant des milliers de kilomètres de quelques semaines à plusieurs mois en fonction du type de piles embarqué, descendre jusqu'à une profondeur de 1 000 mètres, voir plus.
La gestion du glider et la collecte des données demande une organisation délicate. La collecte des données et le pilotage se faisant par le même canal satellite, il faut gérer ce flux bidirectionnel et effectuer le traitement des données le plus rapidement possible afin de pouvoir réagir rapidement pour piloter au mieux le glider. Sachant qu'un glider fait surface toutes les 2 à 5 heures, cela laisse peu de temps pour réagir. C'est une surveillance permanente.
Les planeurs sous-marins sont complémentaires des profileurs Argo qui sont limités à des petites distances.
Par rapport aux balises et capteurs embarqués sur des mammifères marins, leur coût est plus élevé et ils ont des difficultés à éviter des obstacles non référencés comme des objets flottants, de la glace de mer. Comparé à un navire océanographique, son prix est bas.
Un avantage cependant est qu'ils peuvent réaliser de longues séries de mesures sur des zones définies selon un échantillonnage maîtrisé.
Cette idée de planeur est ancienne. Elle a été proposé par Henry Stommel en 1989, connu sous le nom de Slocum, en l'honneur de Joshua Slocum, qui a effectué le premier tour du monde en solitaire en voilier. L'idée était d'exploiter l'énergie du gradient thermique entre les eaux profondes de l'océan (2 à 4°C) et les eaux de surface (près de la température atmosphérique) pour atteindre une autonomie autour du globe, limitée uniquement par la puissance de la batterie à bord pour les communications, les capteurs et les ordinateurs de navigation. Henry Stommel, un des plus grands océanographes du XXème siècle déclarait en 1955 : «Faute d’observations, l’océanographie est surtout le fruit de l’imagination des océanographes».
L'utilisation de planeurs sous-marins pour les programmes d'observations des océans côtier et hauturier se s'est développée vers les années 2000.
Pour être mise en oeuvre de manière efficace, elle supposait une infrastructure et la création d'une flottille de Glider. Ceci a été réalisé par une mutualisation entre tous les acteurs au sein d’une structure technique dans le cadre d’une association entre les équipes de l'Ifremer et la Division Technique de l'INSU.
En 2008, grâce à deux chercheurs océanographes P. Testor (LOCEAN) et L. Mortier (ENSTA), le CNRS a créé le parc national des gliders en partenariat avec le CETSM / IFREMER et avec le concours de la DGA, l’IRD et l’UPMC. Il a été intégré à la Division Technique de l'INSU et localisé à La Seyne-sur-mer.

Les observations de l'océan par gliders sont utilisés par nombre de programmes : par exemple, les travaux de l'INSU sur le circuit 3D des masses d'eau en Méditerranée :
"Non seulement des mouillages, des bouées météo, des navires océanographiques et des avions de recherche ont été déployés, mais aussi des plateformes autonomes issues des derniers développements technologiques pour fournir l’extension dans le temps et dans l’espace en temps quasi-réel : bouées dérivant avec le courant de surface, flotteurs-profileurs (ARGO), planeurs sous-marins (« gliders »), capteurs installés sur un navire de commerce, et enfin profileurs de vent installés à terre."
Documentation
Parc national des gliders - Insu
Engins sous-marins Ifremer
Projet collaboratif en Océanographie Côtière - LEFE-GMMC
Ensta Présentation des gliders et des défis associés.
The Slocum Mission - Narrative and Illustration - Henry Stommel
Mesures radar HF
Article à venir.
Ces mesures concernent le suivi temps-réel des courants de surface sur une large zone couvrant les zones côtières.
La technique utilisée est le radar courantomètrique.
Réseau national de radars côtiers pour la mesure des courants, états de mer et vent. Mercator Océan.
Publications de Céline Quentin, chef de projet "Radar HF au CNRS", Institut Méditerranéen d'Océanologie
Archives ouvertes Hal - Toulon
IV - Quels programmes ?
Un grand nombre d'équipes travaillant dans le monde entier, géophysiciens, biologistes, climatologues, océanographes... ont besoin pour leurs travaux théoriques ou appliqués d'une pluralité de données océanographiques.
Comment utiliser au mieux toutes ces opportunités, technologies, et multiples mesures qui permettent d'observer l'évolution de l'océan et qui concernent l'ensemble de la planète ?
Une recette éprouvée, la coopération, le partenariat, et la pluridisciplinarité !!!
L'océanographie opérationnelle, héritière d'expériences mondiales comme WOCE (World Ocean Circulation Experiment) ou TOGA (Tropical Ocean Global Atmosphere), s'inscrit dans une démarche plus vaste de surveillance de la Planète. En effet, compte tenu des risques naturels ou artificiels, conséquences des activités humaines, une auscultation permanente de tous les compartiments de la biosphère (atmosphère, océan, végétation), est indispensable. Toute la difficulté de cette démarche à peine entamée est de faire converger les multiples initiatives par institutions, par culture, par région ou par type de problématique...
Outre les centaines de bouées fixes ou dérivantes déployées "individuellement" pour les besoins de l'Océanographie ou ceux de la Météorologie, des réseaux internationaux de bouées ou de flotteurs transmettent les données en temps quasi réel, et ce depuis plusieurs décennies.
Citons le programme TAO (Tropical Atmosphere Ocean project) dont le développement a été motivé par le phénomène El Niño de 1982-1983. Le réseau prototype (TOGA), achevé en 1994, a déployé 70 mouillages opérationnels (type ATLAS, Autonomous Temperature Line Acquisition System) réparties dans l'océan Pacifique, donnant des informations sur le vent en surface, l'humidité relative, la température de l'air et de la mer en surface et subsurface. Cette expérience à laquelle participèrent les USA, la France, le Japon, Taiwan et la Corée s'est poursuivie, sous l'égide de CLIVAR, GOOS, et GCOS (voir ci-après).
Elle est devenue en 2000 le réseau TAO/TRITON , avec l'introduction des bouées Japonaise TRITON (Triangle Trans Ocean Buoy Network).
La dernière initiative est le programme international Argo, le déploiement mondial d'un réseau de flotteurs profileurs qui est en pleine expansion.
Le programme Argo a été lancé en 2000 sous l'égide de la COI par 18 de ses pays membres.
Il complète les mesures d'altimétrie (satellites Jason puis Sentinel et Envisat) et permet ainsi d'alimenter les modèles numériques.
En septembre 2006, 2527 profileurs recueillaient des données sur la température et la salinité de l'eau dans tous les océans du monde.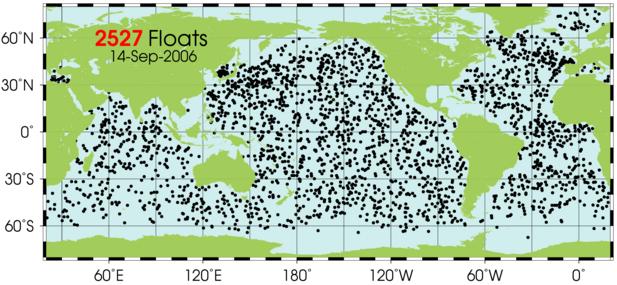
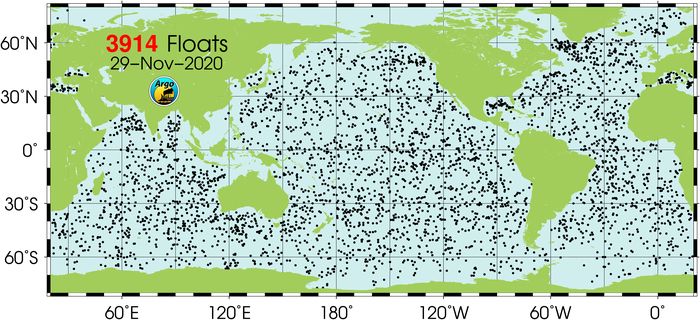
Origine, International Argo Information Center
En 2020, c'est quasiment 4 000 flotteurs qui recouvrent l'ensemble des mers y compris l'océan Arctique.
Les deux réseaux TAO et ARGO, équipés de balises Argos transmettent leurs données par satellite à un centre de réception qui les redistribue aux équipes concernées, quasiment en temps réel, soit par internet, soit via le GTS (Global Telecommunications System) de l'OMM (Organisation Météorologique Mondiale).
Le traitement en temps réel des données du programme Argo est effectué principalement dans deux centres spécialisés situé l'un en France, l'autre aux États Unis.
L’infrastructure Coriolis commune aux organismes IRD, IFREMER, SHOM, Météo France, CNES, CEREMA, IPEV rassemble un réseau de données incluant Argo, les flotteurs de surface, les marégraphes, les gliders et certaines données de navires marchands et de recherche. Beaucoup d'équipes de recherche françaises et étrangères transmettent leurs données des campagnes en temps réel au centre opérationnel Coriolis. L’ensemble plus complet des données des campagnes françaises sont gérées quant à elles dans la base de données SISMER de l’Ifremer. Le pôle de données ODATIS a été mis en place plus récemment pour regrouper l’ensemble des bases de données et des produits liés à l’observation de l’océan (in-situ et satellite).
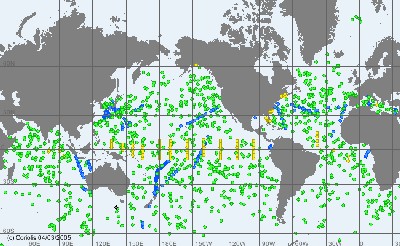
Répartition des flotteurs Argo et bouées captées par Coriollis
Des structures similaires pour la gestion des données océaniques existent dans les différents pays (e.g. NODC et Argo data centers aux USA).
Ces centres de collecte, de traitement et de diffusion de données ont été une première concrétisation d'initiatives antérieures dans le domaine de l'océan et du climat comme : Global Ocean Observing System (GOOS), Global Climate Observing System (GCOS), Climate Variability and Predictability Experiment (CLIVAR), and Global Ocean Data Assimilation Experiment (GODAE).
En 2003, les gouvernements ont créé GEOSS (Global Earth Observation System of Systems), afin de combler au niveau mondial le manque d’observations des facteurs qui influencent le climat de la Terre.
En Europe, un programme européen pour la surveillance mondiale pour l'environnement et la sécurité a été initié en 1998. Il s'agissait de GMES (Global Monitoring for Environment and Security) qui est devenu Copernicus (Europe's eyes on Earth) en 2014. Le programme Copernicus inclut une composante spatiale (les sentinelles), une composante in-situ mis en œuvre par les états membres et six services européens dont le service marin (CMEMS) mis en œuvre par Mercator Ocean International.
La création de l'ERIC Euro-Argo en 2014 a pour objectif d’optimiser et de pérenniser la contribution de l’Europe au programme mondial Argo et de fournir un service d’excellence à la communauté scientifique "océan- climat" et à l’océanographie opérationnelle.
Euro-Argo comprend également la réalisation d’une nouvelle phase du programme Argo : l'extension aux plus grandes profondeurs, aux paramètres biogéochimiques et à la couverture des zones polaires.
L'objectif d'Euro-Argo est d'organiser les contributions de ses membres afin de permettre à l'Europe de :
- Déployer et maintenir un réseau de flotteurs Argo,
- Fournir un service d'excellence aux communautés recherche (océan, climat) et océanographie opérationnelle (Copernicus Marine Environment Monitoring Service).
V - Quelles avancées technologiques ?
Source Argo
Comme le montre la figure ci-dessus, près de 4 000 flotteurs couvrent toutes les mers du Globe, dont la plus grande partie recueille toujours des données sur la température et la salinité de l'eau, mais dont une autre partie recueille d'autres données grâce aux flotteurs biogéochimiques et aux mesures à grande profondeurs.
Ces développements ont été faits grâce au projet Equipex-NAOS , démarré en 2011.
Ils ont permis de développer de nouvelles génération de flotteurs :
- les flotteurs "BCG-Argo" (BioGeoChimique) qui sont équipés de capteurs de mesures du ph, de l'oxygène ,du nitrate, de la chlorophylle.
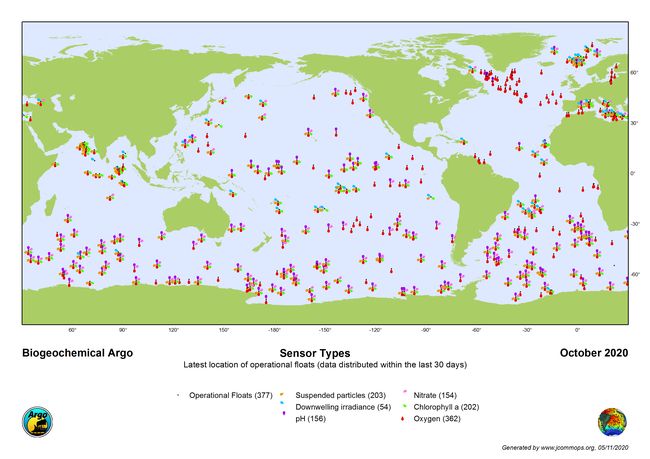
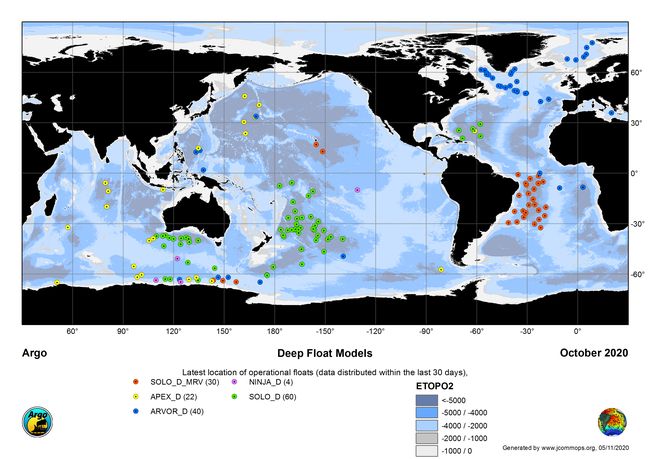
- Les flotteurs profonds qui fournissent des données jusqu'à 4 000 m de profondeur (voire 6 000 m pour certains flotteurs) ce qui permet de connaître comment l’excès de chaleur pénètre et voyage dans l’océan.
VI - Conclusions
Issue d'une coopération très réussie entre plus de 30 pays, ce réseau mondial unique d'observation globale in-situ des océans, complément indispensable des observations satellites, a permis de mettre en oeuvre la démarche préconisé par Claude Bernard : "observer, comprendre, prévoir", chère au Club des Argonautes.
On peut dire qu'il est maintenant pérennisé.
Depuis plus de deux décennies, on dispose de manière opérationnelle d'un grand nombre de données hydrologiques en temps réel :
- Les mesures faites systématiquement à partir de navires dits d’opportunité le long de lignes de navires commerciaux (programme "Ship of opportunity")
- Les flotteurs qui dérivent en surface au gré des courants (global drifter programme)
- Le réseau de flotteurs de sub-surface du programme Argo, déployés dans tout l’océan qui sont programmés pour explorer tous les dix jours les 2000 premiers mètres de l’océan et au-delà
- Les mouillages de longue durée comme ceux des réseaux TAO/ Triton et Pirata qui surveillent les océans Pacifique et Atlantique équatoriaux.
Cette série d'observations a permis des avancées remarquables dans la représentation par des modèles numériques de l’océan. Les données sont systématiquement utilisées par les systèmes mondiaux d’océanographie opérationnelle (e.g. NOAA aux USA, BOM en Australie, Mercator Ocean en France et le service marin de Copernicus qui fédère l’ensemble des systèmes européens).
La France est très présente dans tous les aspects du programme Argo : elle possède, à Brest, l'un des deux centres mondiaux de traitement des données Argo (Coriolis), elle participe au développement de l'instrumentation (NAOS programme Equipex) et à la mise à l'eau des flotteurs. De nombreux laboratoires contribuent à la recherche "océan, climat, biogéochimie" (Insu, Ipsl, Lops, Locean, Ifremer,.. liste loin d'être exhaustive) et à l’océanographie opérationnelle (Mercator Ocean, Service Marin de Copernicus).
Documentation :
Le projet NAOS
Brochure finale NAOS
Réunion finale NAOS-EQUIPEX
Articles :
Preparing the New Phase of Argo: Scientific Achievements of the NAOS Project
Preparing the New Phase of Argo: Technological Developments on Profiling Floats in the NAOS Project
Mise à jour Madeleine Zaharia, Yves Dandonneau, décembre 2020.
Remerciements à Pierre Yves Le Traon de Mercator Océan pour la relecture de cet article et les compléments apportés.